-
1 motor control center (centralized locations where the main disconnects and starters for motors are located)
Англо-русский словарь нефтегазовой промышленности > motor control center (centralized locations where the main disconnects and starters for motors are located)
-
2 motor control center
Англо-русский словарь нефтегазовой промышленности > motor control center
-
3 intelligent motor control system
2) Глоссарий компании Сахалин Энерджи: интеллектуальная (программируемая) система управления электродвигателями, интеллектуальная система управления двигателями (IMCS)3) Сахалин Р: актуальная система управления двигателямиУниверсальный англо-русский словарь > intelligent motor control system
-
4 integrated motor control system
2) Глоссарий компании Сахалин Энерджи: комплексная система управления электродвигателямиУниверсальный англо-русский словарь > integrated motor control system
-
5 maintenance control center
* * *Англо-русский словарь нефтегазовой промышленности > maintenance control center
-
6 maintenance control center
1) Военный термин: пункт контроля технического обслуживания, центр контроля ТО, центр контроля технического обслуживания4) Сахалин Р: система управления электродвигателямиУниверсальный англо-русский словарь > maintenance control center
-
7 motor control center (centralized location[s] where the main disconnects and starters for motors are located)
Глоссарий компании Сахалин Энерджи: Система Управления электродвигателямиУниверсальный англо-русский словарь > motor control center (centralized location[s] where the main disconnects and starters for motors are located)
-
8 motor management system
система управления электродвигателем
-Параллельные тексты EN-RU
The TeSys® T Motor Management System offers protection, control, and monitoring capabilities for single-phase and 3-phase AC induction motors.
[Schneider Electric]Система управления электродвигателем The TeSys® T предназначена для защиты, управления и контроля параметров однофазных и трехфазных асинхронных электродвигателей.
[Перевод Интент]
Тематики
EN
Англо-русский словарь нормативно-технической терминологии > motor management system
-
9 motor control center
система управления электродвигателем на АЭС
пункт управления электродвигателем на АЭС
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
Синонимы
EN
центр управления электродвигателями
Комплектное устройство (обычно шкаф), функцией которого является управление электродвигателями.
[Интент]
Центр управления электродвигателями - MotorSys
[Schneider Electric]Параллельные тексты EN-RU
Motor Control Centers are intended for the control and centralized protection of motors: they include the relevant switching and protection equipment (independent functional units) and the control and signalling auxiliary equipment.
They are characterized by drawer-units (outgoing units), each of them connected to one motor so that it may be possible to operate in total safety on each single outgoing unit without disconnecting the loads.
[ABB]Центры управления электродвигателями предназначены для управления и централизованной защиты электродвигателей: в их состав входят соответствующих выключатели и аппараты защиты (независимые функциональные блоки), а также вспомогательные аппараты контроля состояния и сигнализации.
Блоки вывода выполнены в виде выдвижных ящиков, каждый из которых электрически соединен только с одним электродвигателем, что позволяет при необходимости совершенно безопасно отсоединить блок управления требуемого электродвигателя, не отсоединяя при этом все остальные нагрузки.
[Перевод Интент]Тематики
- НКУ (шкафы, пульты,...)
Синонимы
EN
Англо-русский словарь нормативно-технической терминологии > motor control center
-
10 HMI
- человеко-машинный интерфейс
- человеко-машинное взаимодействие
- терминал
- интерфейс управления концентратором
- интерфейс "человек-машина"
интерфейс "человек-машина"
аппаратно-программная система управления технологическими процессами
HMI - это набор всех средств, позволяющих человеку вмешаться в поведение вычислительной системы. Как правило, HMI представляет собой компьютер с графическим дисплеем, где в наглядной форме отображается поведение системы, и пользователь имеет возможность вмешаться в деятельность системы. Однако в качестве HMI может выступать самый простой пульт из набора тумблеров и светодиодных индикаторов.
[ http://www.morepc.ru/dict/]Тематики
Синонимы
EN
интерфейс управления концентратором
—
[Л.Г.Суменко. Англо-русский словарь по информационным технологиям. М.: ГП ЦНИИС, 2003.]Тематики
EN
терминал
Устройство ввода-вывода, обеспечивающее взаимодействие пользователей в локальной вычислительной сети или с удаленной ЭВМ через средства телеобработки данных
[ ГОСТ 25868-91]
[ ГОСТ Р 50304-92 ]Параллельные тексты EN-RU
HMI port warning
[Schneider Electric]Предупредительное состояние об ошибке обмена данными через порт связи с терминалом оператора
[Перевод Интент]HMI display max current phase enable
[Schneider Electric]Разрешается отображение на терминале оператора максимального линейного тока
[Перевод Интент]Config via HMI keypad enable
[Schneider Electric]Конфигурирование (системы) с помощью клавиатуры терминала оператора
[Перевод Интент]
Тематики
- оборуд. перифер. систем обраб. информации
- системы для сопряж. радиоэлектр. средств интерфейсные
Обобщающие термины
Синонимы
EN
человеко-машинное взаимодействие
—
[Е.С.Алексеев, А.А.Мячев. Англо-русский толковый словарь по системотехнике ЭВМ. Москва 1993]Тематики
EN
человеко-машинный интерфейс (ЧМИ)
Технические средства, предназначенные для обеспечения непосредственного взаимодействия между оператором и оборудованием и дающие возможность оператору управлять оборудованием и контролировать его функционирование.
Примечание
Такие средства могут включать приводимые в действие вручную органы управления, контрольные устройства, дисплеи.
[ ГОСТ Р МЭК 60447-2000]
человекомашинный интерфейс (ЧМИ)
Технические средства контроля и управления, являющиеся частью оборудования, предназначенные для обеспечения непосредственного взаимодействия между оператором и оборудованием и дающие возможность оператору управлять оборудованием и контролировать его функционирование (ГОСТ Р МЭК 60447).
Примечание
Такие средства могут включать приводимые в действие вручную органы управления, контрольные устройства и дисплеи.
[ ГОСТ Р МЭК 60073-2000]
человеко-машинный интерфейс
Средства обеспечения двусторонней связи "оператор - технологическое оборудование" (АСУ ТП). Название класса средств, в который входят подклассы:
SCADA (Supervisory Control and Data Acquisition) - Операторское управление и сбор данных от технологического оборудования.
DCS (Distributed Control Systems) - Распределенная система управления технологическим оборудованием.
[ http://www.morepc.ru/dict/]Параллельные тексты EN-RU
MotorSys™ iPMCC solutions can integrate a dedicated human-machine interface (HMI) or communicate via a personal computer directly on the motor starters.
[Schneider Electric]Интеллектуальный центр распределения электроэнергии и управления электродвигателями MotorSys™ может иметь в своем составе специальный человеко-машинный интерфейс (ЧМИ). В качестве альтернативы используется обмен данным между персональным компьютером и пускателями.
[Перевод Интент]
HMI на базе операторских станций
Самое, пожалуй, главное в системе управления - это организация взаимодействия между человеком и программно-аппаратным комплексом. Обеспечение такого взаимодействия и есть задача человеко-машинного интерфейса (HMI, human machine interface).
На мой взгляд, в аббревиатуре “АСУ ТП” ключевым является слово “автоматизированная”, что подразумевает непосредственное участие человека в процессе реализации системой определенных задач. Очевидно, что чем лучше организован HMI, тем эффективнее человек сможет решать поставленные задачи.
Как же организован HMI в современных АСУ ТП?
Существует, как минимум, два подхода реализации функционала HMI:- На базе специализированных рабочих станций оператора, устанавливаемых в центральной диспетчерской;
- На базе панелей локального управления, устанавливаемых непосредственно в цеху по близости с контролируемым технологическим объектам.
Иногда эти два варианта комбинируют, чтобы достичь наибольшей гибкости управления. В данной статье речь пойдет о первом варианте организации операторского уровня.
Аппаратно рабочая станция оператора (OS, operator station) представляет собой ни что иное как персональный компьютер. Как правило, станция снабжается несколькими широкоэкранными мониторами, функциональной клавиатурой и необходимыми сетевыми адаптерами для подключения к сетям верхнего уровня (например, на базе Industrial Ethernet). Станция оператора несколько отличается от привычных для нас офисных компьютеров, прежде всего, своим исполнением и эксплуатационными характеристиками (а также ценой 4000 - 10 000 долларов).
На рисунке 1 изображена рабочая станция оператора системы SIMATIC PCS7 производства Siemens, обладающая следующими техническими характеристиками:
Процессор: Intel Pentium 4, 3.4 ГГц;
Память: DDR2 SDRAM до 4 ГБ;
Материнская плата: ChipSet Intel 945G;
Жесткий диск: SATA-RAID 1/2 x 120 ГБ;
Слоты: 4 x PCI, 2 x PCI E x 1, 1 x PCI E x 16;
Степень защиты: IP 31;
Температура при эксплуатации: 5 – 45 C;
Влажность: 5 – 95 % (без образования конденсата);
Операционная система: Windows XP Professional/2003 Server.
Рис. 1. Пример промышленной рабочей станции оператора.Системный блок может быть как настольного исполнения ( desktop), так и для монтажа в 19” стойку ( rack-mounted). Чаще применяется второй вариант: системный блок монтируется в запираемую стойку для лучшей защищенности и предотвращения несанкционированного доступа.
Какое программное обеспечение используется?
На станции оператора устанавливается программный пакет визуализации технологического процесса (часто называемый SCADA). Большинство пакетов визуализации работают под управлением операционных систем семейства Windows (Windows NT 4.0, Windows 2000/XP, Windows 2003 Server), что, на мой взгляд, является большим минусом.
Программное обеспечение визуализации призвано выполнять следующие задачи:- Отображение технологической информации в удобной для человека графической форме (как правило, в виде интерактивных мнемосхем) – Process Visualization;
- Отображение аварийных сигнализаций технологического процесса – Alarm Visualization;
- Архивирование технологических данных (сбор истории процесса) – Historical Archiving;
- Предоставление оператору возможности манипулировать (управлять) объектами управления – Operator Control.
- Контроль доступа и протоколирование действий оператора – Access Control and Operator’s Actions Archiving.
- Автоматизированное составление отчетов за произвольный интервал времени (посменные отчеты, еженедельные, ежемесячные и т.д.) – Automated Reporting.
Как правило, SCADA состоит из двух частей:
- Среды разработки, где инженер рисует и программирует технологические мнемосхемы;
- Среды исполнения, необходимой для выполнения сконфигурированных мнемосхем в режиме runtime. Фактически это режим повседневной эксплуатации.
Существует две схемы подключения операторских станций к системе управления, а точнее уровню управления. В рамках первой схемы каждая операторская станция подключается к контроллерам уровня управления напрямую или с помощью промежуточного коммутатора (см. рисунок 2). Подключенная таким образом операторская станция работает независимо от других станций сети, и поэтому часто называется одиночной (пусть Вас не смущает такое название, на самом деле таких станций в сети может быть несколько).

Рис. 2. Схема подключения одиночных операторских станций к уровню управления.Есть и другой вариант. Часто операторские станции подключают к серверу или резервированной паре серверов, а серверы в свою очередь подключаются к промышленным контроллерам. Таким образом, сервер, являясь неким буфером, постоянно считывает данные с контроллера и предоставляет их по запросу рабочим станциям. Станции, подключенные по такой схеме, часто называют клиентами (см. рисунок 3).
Как происходит информационный обмен?
Рис. 3. Клиент-серверная архитектура операторского уровня.
Для сопряжения операторской станции с промышленным контроллером на первой устанавливается специальное ПО, называемое драйвером ввода/вывода. Драйвер ввода/вывода поддерживает совместимый с контроллером коммуникационный протокол и позволяет прикладным программам считывать с контроллера параметры или наоборот записывать в него. Пакет визуализации обращается к драйверу ввода/вывода каждый раз, когда требуется обновление отображаемой информации или запись измененных оператором данных. Для взаимодействия пакета визуализации и драйвера ввода/вывода используется несколько протоколов, наиболее популярные из которых OPC (OLE for Process Control) и NetDDE (Network Dynamic Data Exchange). Обобщенно можно сказать, что OPC и NetDDE – это протоколы информационного обмена между различными приложениями, которые могут выполняться как на одном, так и на разных компьютерах. На рисунках 4 и 5 изображено, как взаимодействуют программные компоненты при различных схемах построения операторского уровня.
Рис. 4. Схема взаимодействия программных модулей при использовании одиночных станций.
Рис. 5. Схема взаимодействия программных модулей при использовании клиент-серверной архитектуры.
Как выглядит SCADA?
Разберем простой пример. На рисунке 6 приведена абстрактная схема технологического процесса, хотя полноценным процессом это назвать трудно. Рис. 6. Пример операторской мнемосхемы.
Рис. 6. Пример операторской мнемосхемы.
На рисунке 6 изображен очень упрощенный вариант операторской мнемосхемы для управления тех. процессом. Как видно, резервуар (емкость) наполняется водой. Задача системы - нагреть эту воду до определенной температуры. Для нагрева воды используется газовая горелка. Интенсивность горения регулируется клапаном подачи газа. Также должен быть насос для закачки воды в резервуар и клапан для спуска воды.
На мнемосхеме отображаются основные технологические параметры, такие как: температура воды; уровень воды в резервуаре; работа насосов; состояние клапанов и т.д. Эти данные обновляются на экране с заданной частотой. Если какой-либо параметр достигает аварийного значения, соответствующее поле начинает мигать, привлекая внимание оператора.
Сигналы ввода/вывода и исполнительные механизмы отображаются на мнемосхемах в виде интерактивных графических символов (иконок). Каждому типу сигналов и исполнительных механизмов присваивается свой символ: для дискретного сигнала это может быть переключатель, кнопка или лампочка; для аналогового – ползунок, диаграмма или текстовое поле; для двигателей и насосов – более сложные фейсплейты ( faceplates). Каждый символ, как правило, представляет собой отдельный ActiveX компонент. Вообще технология ActiveX широко используется в SCADA-пакетах, так как позволяет разработчику подгружать дополнительные символы, не входящие в стандартную библиотеку, а также разрабатывать свои собственные графические элементы, используя высокоуровневые языки программирования.
Допустим, оператор хочет включить насос. Для этого он щелкает по его иконке и вызывает панель управления ( faceplate). На этой панели он может выполнить определенные манипуляции: включить или выключить насос, подтвердить аварийную сигнализацию, перевести его в режим “техобслуживания” и т.д. (см. рисунок 7). Рис. 7. Пример фейсплейта для управления насосом.Оператор также может посмотреть график изменения интересующего его технологического параметра, например, за прошедшую неделю. Для этого ему надо вызвать тренд ( trend) и выбрать соответствующий параметр для отображения. Пример тренда реального времени показан на рисунке 8.
Рис. 7. Пример фейсплейта для управления насосом.Оператор также может посмотреть график изменения интересующего его технологического параметра, например, за прошедшую неделю. Для этого ему надо вызвать тренд ( trend) и выбрать соответствующий параметр для отображения. Пример тренда реального времени показан на рисунке 8.
 Рис. 8. Пример отображения двух параметров на тренде реального времени.
Рис. 8. Пример отображения двух параметров на тренде реального времени.
Для более детального обзора сообщений и аварийных сигнализаций оператор может воспользоваться специальной панелью ( alarm panel), пример которой изображен на рисунке 9. Это отсортированный список сигнализаций (alarms), представленный в удобной для восприятия форме. Оператор может подтвердить ту или иную аварийную сигнализацию, применить фильтр или просто ее скрыть. Рис. 9. Панель сообщений и аварийных сигнализаций.
Рис. 9. Панель сообщений и аварийных сигнализаций.
Говоря о SCADA, инженеры часто оперируют таким важным понятием как “тэг” ( tag). Тэг является по существу некой переменной программы визуализации и может быть использован как для локального хранения данных внутри программы, так и в качестве ссылки на внешний параметр процесса. Тэги могут быть разных типов, начиная от обычных числовых данных и кончая структурой с множеством полей. Например, один визуализируемый параметр ввода/вывода – это тэг, или функциональный блок PID-регулятора, выполняемый внутри контроллера, - это тоже тэг. Ниже представлена сильно упрощенная структура тэга, соответствующего простому PID-регулятору:
Tag Name = “MyPID”;
Tag Type = PID;
Fields (список параметров):
MyPID.OP
MyPID.SP
MyPID.PV
MyPID.PR
MyPID.TI
MyPID.DI
MyPID.Mode
MyPID.RemoteSP
MyPID.Alarms и т.д.
В комплексной прикладной программе может быть несколько тысяч тэгов. Производители SCADA-пакетов это знают и поэтому применяют политику лицензирования на основе количества используемых тэгов. Каждая купленная лицензия жестко ограничивает суммарное количество тэгов, которые можно использовать в программе. Очевидно, чем больше тегов поддерживает лицензия, тем дороже она стоит; так, например, лицензия на 60 000 тэгов может обойтись в 5000 тыс. долларов или даже дороже. В дополнение к этому многие производители SCADA формируют весьма существенную разницу в цене между “голой” средой исполнения и полноценной средой разработки; естественно, последняя с таким же количеством тэгов будет стоить заметно дороже.
Сегодня на рынке представлено большое количество различных SCADA-пакетов, наиболее популярные из которых представлены ниже:
1. Wonderware Intouch;
2. Simatic WinCC;
3. Iconics Genesis32;
4. Citect;
5. Adastra Trace Mode
Лидирующие позиции занимают Wonderware Intouch (производства Invensys) и Simatic WinCC (разработки Siemens) с суммарным количеством инсталляций более 80 тыс. в мире. Пакет визуализации технологического процесса может поставляться как в составе комплексной системы управления, так и в виде отдельного программного продукта. В последнем случае SCADA комплектуется набором драйверов ввода/вывода для коммуникации с контроллерами различных производителей. [ http://kazanets.narod.ru/HMI_PART1.htm]Тематики
- автоматизация, основные понятия
- автоматизированные системы
Синонимы
EN
Англо-русский словарь нормативно-технической терминологии > HMI
11 operating control
оперативное управление
Управление текущими событиями, включающее оперативное планирование, оперативный учет, оперативный контроль.
[Энциклопедический словарь экономики и права]Параллельные тексты EN-RU
Information for site engineering
With information delivered to ensure the traceability of electrical distribution, motor operation and power consumption data, installations are constantly improved.
[Schneider Electric]Информационная система для оперативного управления
Предоставляемая системой информация, позволяет отслеживать различные процессы, связанные с распределением электроэнергии, управлением электродвигателями и потреблением электроэнергии, что дает возможность постоянно улучшать эффективность электроустановок.
[Перевод Интент]
Тематики
EN
операционный контроль
Контроль продукции или процесса во время выполнения или после завершения технологической операции.
[ ГОСТ 16504-81]
[ ГОСТ 31359-2007]
[ ГОСТ 13015-2003]
операционный контроль
Право владельцев контрольной доли собственности, ограниченное возможностью выбирать большинство членов совета директоров, в отличие от абсолютного контроля (см.).
[ http://slovar-lopatnikov.ru/]Тематики
EN
FR
орган управления
Частьсистемыаппарата управления, к которой прилагается извне усилие управления.
МЭК 60050(441-15-22).
Примечание. Орган управления может иметь форму рукоятки, ручки, нажимной кнопки, ролика, плунжера и т. п.
[ ГОСТ Р 50030. 1-2000 ( МЭК 60947-1-99)]
орган управления
Часть приводного механизма, к которой прикладывается внешняя сила воздействия.
Примечание - Орган управления может иметь форму ручки, кнопки, ролика, поршня и т.д.
[ ГОСТ Р 52726-2007]
орган управления
Часть системы привода, подвергаемая внешнему силовому воздействию.
Примечания
1. Орган управления может иметь форму ручки, рукоятки, нажимной кнопки, ролика, плунжера и т.д.
2. Есть несколько способов приведения в действие, которые не требуют внешнего силового воздействия, а только какого-либо действия.
[ГОСТ ЕН 1070-2003]
орган управления
Часть системы управления, которая предназначена непосредственно для воздействия оператором, например путем нажатия.
[ГОСТ Р ЕН 614-1-2003]
орган управления
Часть системы приведения в действие, которая принимает воздействие человека.
[ ГОСТ Р МЭК 60447-2000]
орган управления
Часть системы приведения в действие, которая воспринимает воздействие человека (ГОСТ Р МЭК 60447).
Примечание
В настоящем стандарте орган управления в виде интерактивного экранного устройства отображения является частью этого устройства, которое представляет функцию органа управления.
[ ГОСТ Р МЭК 60073-2000]
орган управления
Часть механизма прибора управления, на который оказывается вручную внешнее силовое воздействие.
Примечание.
Орган управления может иметь форму ручки, рукоятки, кнопки, ролика, плунжера и т.д.
Некоторые органы управления не требуют воздействия внешней силы, а только какого-либо действия.
[ ГОСТ Р МЭК 60204-1-2007]
органы управления
Ручки, переключатели, потенциометры и другие органы, служащие для включения и регулировки аппаратуры. Термин относится преимущественно к аналоговым приборам.
[Система неразрушающего контроля. Виды (методы) и технология неразрушающего контроля. Термины и определения (справочное пособие). Москва 2003 г.]
орган управления
-
[IEV number 442-04-14]
средства оперирования
-
[Интент]EN
actuator
the part of the actuating system to which an external actuating force is applied
NOTE – The actuator may take the form of a handle, knob, push-button, roller, plunger, etc.
[IEV number 441-15-22]
actuator
part of a device to which an external manual action is to be applied
NOTE 1 The actuator may take the form of a handle, knob, push-button, roller, plunger, etc.
NOTE 2 There are some actuating means that do not require an external actuating force, but only an action.
NOTE 3 See also 3.34.
[IEC 60204-1 -2005]
actuating member
a part which is pulled, pushed, turned or otherwise moved to cause an operation of the switch
[IEV number 442-04-14]FR
organe de commande
partie du mécanisme transmetteur à laquelle un effort extérieur de manoeuvre est appliqué
NOTE – L'organe de commande peut prendre la forme d'une poignée, d'un bouton, d'un bouton-poussoir, d'une roulette, d'un plongeur, etc.
[IEV number 441-15-22]
organe de manoeuvre
partie qui est tirée, poussée, tournée ou manipulée de toute autre façon pour provoquer le fonctionnement de l'interrupteur
[IEV number 442-04-14]
Аппарат должен оставаться механически действующим. Не допускается сваривание контактов, препятствующее операции размыкания при использовании нормальных средств оперирования.
[ГОСТ Р 50030.3-99 (МЭК 60947-3-99) ]
ВДТ следует оперировать как при нормальной эксплуатации. Операции размыкания должны проводиться в следующем порядке:
для первых 1000 циклов — с использованием ручных средств оперирования;...
[ ГОСТ Р 51326. 1-99 ( МЭК 61008-1-96)]Параллельные тексты EN-RU
The operating means (for example, a handle) of the supply disconnecting device shall be easily accessible and located between 0,6 m and 1,9 m above the servicing level.
[IEC 60204-1-2006]Органы управления, например, рукоятки аппаратов отключения питания, должны быть легко доступны и располагаться на высоте от 0,6 до 1,9 м от рабочей площадки.
[Перевод Интент]Where the external operating means is not intended for emergency operations, it is recommended that it be coloured BLACK or GREY.
[IEC 60204-1-2006]Если внешние средства оперирования не предназначены для выполнения действий при возникновении аварийных ситуаций, то рекомендуется, применять такие средства ЧЕРНОГО или СЕРОГО цвета.
[Перевод Интент]1.2.2. Control devices
Control devices must be:
— clearly visible and identifiable and appropriately marked where necessary,
— positioned for safe operation without hesitation or loss of time, and without ambiguity,
— designed so that the movement of the control is consistent with its effect,
— located outside the danger zones, except for certain controls where necessary, such as emergency stop, console for training of robots,
— positioned so that their operation cannot cause additional risk,
— designed or protected so that the desired effect, where a risk is involved, cannot occur without an intentional operation,
— made so as to withstand foreseeable strain; particular attention must be paid to emergency stop devices liable to be subjected to considerable strain.1.2.2. Органы управления
Органы управления должны быть:
- четко видны, хорошо различимы и, где это необходимо, иметь соответствующее обозначение;
- расположены так, чтобы ими можно было пользоваться без возникновения сомнений и потерь времени на выяснение их назначения;
- сконструированы так, чтобы перемещение органа управления согласовывалось с их воздействием;
- расположены вне опасных зон; исключение, где это необходимо, делается для определенных средств управления, таких, как средство экстренной остановки, пульт управления роботом;
- расположены так, чтобы их использование не вызывало дополнительных рисков;
- сконструированы или защищены так, чтобы в случаях, где возможно возникновение рисков, они не могли бы возникнуть без выполнения намеренных действий;
- сделаны так, чтобы выдерживать предполагаемую нагрузку; при этом особое внимание уделяется органам аварийного останова, которые могут подвергаться значительным нагрузкам.Where a control is designed and constructed to perform several different actions, namely where there is no one-to-one correspondence (e.g. keyboards, etc.), the action to be performed must be clearly displayed and subject to confirmation where necessary.
Если орган управления предназначен для выполнения разных действий, например, если в качестве органа управления используется клавиатура или аналогичное устройство, то должна выводиться четкая информация о предстоящем действии, и, если необходимо, должно выполняться подтверждение на выполнение такого действия.
Controls must be so arranged that their layout, travel and resistance to operation are compatible with the action to be performed, taking account of ergonomic principles.
Органы управления должны быть организованы таким образом, чтобы их расположение, перемещение их элементов и усилие, которое оператор затрачивает на их перемещение, соответствовали выполняемым операциям и принципам эргономики.
Constraints due to the necessary or foreseeable use of personal protection equipment (such as footwear, gloves, etc.) must be taken into account.
Необходимо учитывать скованность движений операторов при использовании необходимых или предусмотренных средств индивидуальной защиты (таких, как специальная обувь, перчатки и др.).
Machinery must be fitted with indicators (dials, signals, etc.) as required for safe operation. The operator must be able to read them from the control position.
Для обеспечения безопасной эксплуатации машинное оборудование должно быть оснащено индикаторами (циферблатами, устройствами сигнализации и т. д.). Оператор должен иметь возможность считывать их с места управления.
From the main control position the operator must be able to ensure that there are no exposed persons in the danger zones.
Находясь в главном пункте управления, оператор должен иметь возможность контролировать отсутствие незащищенных лиц.
If this is impossible, the control system must be designed and constructed so that an acoustic and/ or visual warning signal is given whenever the machinery is about to start.
Если это невозможно, то система управления должна быть разработана и изготовлена так, чтобы перед каждым пуском машинного оборудования подавался звуковой и/или световой предупредительный сигнал.
The exposed person must have the time and the means to take rapid action to prevent the machinery starting up.
[DIRECTIVE 98/37/EC OF THE EUROPEAN PARLIAMENT AND OF THE COUNCIL]
Незащищенное лицо должно иметь достаточно времени и средств для быстрого предотвращения пуска машинного оборудования.
[Перевод Интент]
Тематики
- автоматизация, основные понятия
- аппарат, изделие, устройство...
- безопасность машин и труда в целом
- выключатель автоматический
- выключатель, переключатель
- высоковольтный аппарат, оборудование...
- электробезопасность
- электротехника, основные понятия
Синонимы
EN
- actuating member
- actuator
- command unit
- control
- control device
- controller
- controls
- operating control
- operating means
DE
FR
Англо-русский словарь нормативно-технической терминологии > operating control
12 fault
- ток повреждения
- сверхток
- сброс
- сбой
- разлом
- повреждение (цепи, линии, устройства)
- повреждение (во взрывозащите)
- повреждение
- ошибка
- отказ
- ненормальный режим работы
- неисправность
- неисправное состояние
- нарушение
- короткое замыкание
- дизъюктивное нарушение
- дефект
- выход из строя
- аварийное сообщение
аварийное сообщение
-Параллельные тексты EN-RU
The system offers diagnostic and statistics functions and configurable warnings and faults, allowing better prediction of component maintenance, and provides data to continuously improve the entire system.
[Schneider Electric]Система (управления электродвигателем) предоставляет оператору различную диагностическую и статистическую информацию и позволяет сконфигурировать предупредительные и аварийные сообщения, что дает возможность лучше планировать техническое обслуживание и постоянно улучшать систему в целом.
[Перевод Интент]Various alarm notifications are available to indicate a compromised security state such as forced entry and door position.
[APC]Устройство может формировать различные аварийные сообщения о нарушении защиты, например, о несанкционированном проникновении или об изменении положения двери.
[Перевод Интент]
Тематики
EN
выход из строя
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]
выход системы из строя
вследствие отказа аппаратного или программного обеспечения либо средств связи
[Англо-русский толковый словарь терминов и сокращений по ВТ, Интернету и программированию. © 1998-2007 гг., Э.М. Пройдаков, Л.А. Теплицкий. 13,8 тыс. статей.]
выход из строя
-
[Интент]Единичные выходы из строя в процессе испытаний элементов электронной техники (микросхем, электровакуумных и полупроводниковых приборов, конденсаторов, резисторов, кварцевых резонаторов и т.д.), а также ламп накаливания и предохранителей не могут служить основанием для прекращения испытаний, если это не вызвано недостатком конструкции прибора.
При повторных выходах из строя тех же элементов испытания следует считать неудовлетворительными.
[ ГОСТ 24314-80]При выходе из строя отдельно стоящих вентиляторов на двигателях мельниц, дымососов, мельничных вентиляторов, вентиляторов первичного воздуха и т.д. необходимо при первой возможности, но не позже чем его допускается заводской инструкцией, отключить двигатель 6 кВ для ремонта вентилятора охлаждения двигателя.
[РД 34.20.565]Судовая электрическая сеть, предназначенная для передачи электроэнергии при выходе из строя линий электропередачи силовой сети или исчезновении напряжения
[ ГОСТ 22652-77]Тематики
Синонимы
EN
дизъюктивное нарушение
Относительное перемещение частей пластов вдоль плоскости их разрыва (геол.)
[ http://slovarionline.ru/anglo_russkiy_slovar_neftegazovoy_promyishlennosti/]Тематики
EN
короткое замыкание
Случайное или намеренное соединение резистором или импедансом со сравнительно низким сопротивлением двух или более точек в цепи, нормально находящихся под различным напряжением.
Случайное или намеренное низкоимпедансное или низкоомное соединение двух или более точек электрической цепи, нормально находящихся под разными электрическими потенциалами. (вариант компании Интент)
МЭК 60050(151-03-41) [2].
[ ГОСТ Р 50030. 1-2000 ( МЭК 60947-1-99)]
короткое замыкание
Случайный или преднамеренный проводящий путь между двумя или более проводящими частями, принуждающий различия электрических потенциалов между этими проводящими частями становиться равными или близкими к нулю.
Короткое замыкание обычно возникает в аварийном режиме электроустановки здания при повреждении изоляции токоведущих частей, находящихся под разными электрическими потенциалами, и возникновении между этими частями электрического контакта, имеющего пренебрежимо малое полное сопротивление. Короткое замыкание также может быть следствием ошибочных действий, совершаемых персоналом при монтаже и эксплуатации электроустановки здания, когда соединяют между собой проводящие части, которые в нормальном режиме находятся под разными электрическими потенциалами.
Короткое замыкание характеризуется током короткого замыкания, который, многократно превышая номинальный ток электрической цепи, может вызвать возгорание её элементов и явиться причиной пожара в здании. Поэтому в электроустановках зданий всегда проводят мероприятия, направленные на снижение вероятности возникновения короткого замыкания, а также выполняют защиту от короткого замыкания с помощью устройств защиты от сверхтока.
[ http://www.volt-m.ru/glossary/letter/%CA/view/27/]
короткое замыкание
Случайное или преднамеренное соединение двух или более проводящих частей, вызывающее снижение разности электрических потенциалов между этими частями до нуля или значения, близкого к нулю.
[ ГОСТ Р МЭК 60050-195-2005]
короткое замыкание
КЗ
замыкание, при котором токи в ветвях электроустановки, примыкающих к месту его возникновения, резко возрастают, превышая наибольший допустимый ток продолжительного режима
[Методические указания по защите распределительных электрических сетей напряжением 0,4-10 кВ от грозовых перенапряжений]EN
short-circuit
accidental or intentional conductive path between two or more conductive parts forcing the electric potential differences between these conductive parts to be equal to or close to zero
Source: 151-03-41 MOD
[IEV number 195-04-11]FR
court-circuit
chemin conducteur accidentel ou intentionnel entre deux ou plusieurs parties conductrices forçant les différences de potentiel électriques entre ces parties conductrices à être nulles ou proches de zéro
Source: 151-03-41 MOD
[IEV number 195-04-11]Параллельные тексты EN-RU
A short-circuit is a low impedance connection between two conductors at different voltages.
[ABB]Короткое замыкание представляет собой низкоомное соединение двух проводников, находящихся под разными потенциалами.
[Перевод Интент]Тематики
- электробезопасность
- электротехника, основные понятия
Синонимы
- КЗ
EN
DE
FR
нарушение
[Департамент лингвистических услуг Оргкомитета «Сочи 2014». Глоссарий терминов]EN
fault
Another term for offense.
[Департамент лингвистических услуг Оргкомитета «Сочи 2014». Глоссарий терминов]
Тематики
EN
неисправное состояние
Состояние объекта, при котором он не соответствует хотя бы одному из требований нормативно-технической и (или) конструкторской (проектной) документации.
[ ГОСТ 27.002-89]
[ОСТ 45.152-99]
неисправное состояние
неисправность
По ГОСТ 13377-75
[ ГОСТ 24166-80]
неисправное состояние
Состояние системы тревожной сигнализации, препятствующее реагированию системы на наличие опасности в соответствии с требованиями стандартов.
[ ГОСТ Р 50775-95]
[МЭК 839-1-1-88]Тематики
- надежность, основные понятия
- ремонт судов
- системы охраны и безопасности
- тех. обсл. и ремонт средств электросвязи
Обобщающие термины
Синонимы
EN
DE
FR
неисправность
отказ в работе
Состояние машины, характеризующееся неспособностью выполнять заданную функцию, исключая случаи проведения профилактического технического обслуживания, других запланированных действий или недостаток внешних ресурсов (например, отключение энергоснабжения).
Примечание 1
Неисправность часто является результатом повреждения самой машины, однако она может иметь место и без повреждения.
Примечание 2
На практике термины «неисправность», «отказ» и «повреждение» часто используются как синонимы.
[ ГОСТ Р ИСО 12100-1:2007]
неисправность
Состояние оборудования, характеризуемое его неспособностью выполнять требуемую функцию, исключая профилактическое обслуживание или другие планово-предупредительные действия, а также исключая неспособность выполнять требуемую функцию из-за недостатка внешних ресурсов.
Примечание - Неисправность часто является следствием отказа самого оборудования, но может существовать и без предварительного отказа.
[ГОСТ ЕН 1070-2003]
неисправность
Состояние технического объекта (элемента), характеризуемое его неспособностью выполнять требуемую функцию, исключая периоды профилактического технического обслуживания или другие планово-предупредительные действия, или в результате недостатка внешних ресурсов.
Примечания
1 Неисправность является часто следствием отказа самого технического объекта, но может существовать и без предварительного отказа.
2 Английский термин «fault» и его определение идентичны данному в МЭК 60050-191 (МЭС 191-05-01) [1]. В машиностроении чаще применяют французский термин «defaut» или немецкий термин «Fehler», чем термины «panne» и «Fehlzusstand», которые употребляют с этим определением.
[ ГОСТ Р ИСО 13849-1-2003]Тематики
EN
- abnormality
- abort
- abortion
- breakage
- breakdown
- bug
- defect
- disease
- disrepair
- disturbance
- fail
- failure
- failure occurrence
- fault
- faultiness
- fouling
- health problem
- layup
- malfunction
- problem
- shutdown
- trouble
DE
FR
ненормальный режим работы электротехнического изделия
Режим работы электротехнического изделия (электротехнического устройства, электрооборудования), при котором значение хотя бы одного из параметров режима выходит за пределы наибольшего или наименьшего рабочего значения.
[ ГОСТ 18311-80]
К ненормальным относятся режимы, связанные с отклонениями от допустимых значений величин тока, напряжения и частоты, опасные для оборудования или устойчивой работы энергосистемы.
Рассмотрим наиболее характерные ненормальные режимы.а) Перегрузка оборудования, вызванная увеличением тока сверх номинального значения. Номинальным называется максимальный ток, допускаемый для данного оборудования в течение неограниченного времени.
Если ток, проходящий по оборудованию, превышает номинальное значение, то за счет выделяемого им дополнительного тепла температура токоведущих частей и изоляции через некоторое время превосходит допустимую величину, что приводит к ускоренному износу изоляции и ее повреждению. Время, допустимое для прохождения повышенных токов, зависит от их величины. Характер этой зависимости показан на рис. 1-3 и определяется конструкцией оборудования и типом изоляционных материалов. Для предупреждения повреждения оборудования при его перегрузке необходимо принять меры к разгрузке или отключению оборудования.б) Качания в системах возникают при выходе из синхронизма работающих параллельно генераторов (или электростанций) А и В (рис. 1-2, б). При качаниях в каждой точке системы происходит периодическое изменение («качание») тока и напряжения. Ток во всех элементах сети, связывающих вышедшие из синхронизма генераторы А и В, колеблется от нуля до максимального значения, во много раз превышающего нормальную величину. Напряжение падает от нормального до некоторого минимального значения, имеющего разную величину в каждой точке сети. В точке С, называемой электрическим центром качаний, оно снижается до нуля, в остальных точках сети напряжение падает, но остается больше нуля, нарастая от центра качания С к источникам питания А и В. По характеру изменения тока и напряжения качания похожи на к. з. Возрастание тока вызывает нагревание оборудования, а уменьшение напряжения нарушает работу всех потребителей системы. Качание — очень опасный ненормальный режим, отражающийся на работе всей энергосистемы.
в) Повышение напряжения сверх допустимого значения возникает обычно на гидрогенераторах при внезапном отключении их нагрузки. Разгрузившийся гидрогенератор увеличивает частоту вращения, что вызывает возрастание э. д. с. статора до опасных для его изоляции значений. Защита в таких случаях должна снизить ток возбуждения генератора или отключить его.
Опасное для изоляции оборудования повышение напряжения может возникнуть также при одностороннем отключении или включении длинных линий электропередачи с большой емкостной проводимостью.
Кроме отмеченных ненормальных режимов, имеются и другие, ликвидация которых возможна при помощи релейной защиты.[Чернобровов Н. В. Релейная защита. Учебное пособие для техникумов]
Тематики
- изделие электротехническое
- релейная защита
- электротехника, основные понятия
Синонимы
EN
отказ
Нарушение способности оборудования выполнять требуемую функцию.
Примечания
1. После отказа оборудование находится в неисправном состоянии.
2. «Отказ» является событием, в отличие от «неисправности», которая является состоянием.
3. Это понятие, как оно определено, не применяют коборудованиюобъекту, состоящему только из программных средств.
4. На практике термины «отказ» и «неисправность» часто используют как синонимы.
[ГОСТ ЕН 1070-2003]
[ ГОСТ Р ИСО 13849-1-2003]
[ ГОСТ Р МЭК 60204-1-2007]
отказ
Событие, заключающееся в нарушении работоспособного состояния объекта.
[ ГОСТ 27.002-89]
[ОСТ 45.153-99]
[СТО Газпром РД 2.5-141-2005]
[СО 34.21.307-2005]
отказ
Событие, заключающееся в нарушении работоспособного состояния машины и (или) оборудования вследствие конструктивных нарушений при проектировании, несоблюдения установленного процесса производства или ремонта, невыполнения правил или инструкций по эксплуатации.
[Технический регламент о безопасности машин и оборудования]EN
failure
the termination of the ability of an item to perform a required function
NOTE 1 – After failure the item has a fault.
NOTE 2 – "Failure" is an event, as distinguished from "fault", which is a state.
NOTE 3 – This concept as defined does not apply to items consisting of software only.
[IEV number 191-04-01]
NOTE 4 - In practice, the terms fault and failure are often used synonymously
[IEC 60204-1-2006]FR
défaillance
cessation de l'aptitude d'une entité à accomplir une fonction requise
NOTE 1 – Après défaillance d'une entité, cette entité est en état de panne.
NOTE 2 – Une défaillance est un passage d'un état à un autre, par opposition à une panne, qui est un état.
NOTE 3 – La notion de défaillance, telle qu'elle est définie, ne s'applique pas à une entité constituée seulement de logiciel.
[IEV number 191-04-01]Тематики
- безопасность в целом
- безопасность гидротехнических сооружений
- безопасность машин и труда в целом
- газораспределение
- надежность средств электросвязи
- надежность, основные понятия
Обобщающие термины
EN
DE
FR
повреждение
Повреждение любого элемента, разделения, изоляции или соединения между элементами, не являющихся неповреждаемыми по МЭК 60079-11 [8], при проведении испытаний на искробезопасность.
[ ГОСТ Р МЭК 60050-426-2006]
Тематики
EN
повреждение (цепи, линии, устройства)
-
[Интент]Тематики
- выключатель автоматический
- релейная защита
- электротехника, основные понятия
EN
разлом
—
[ http://www.eionet.europa.eu/gemet/alphabetic?langcode=en]EN
fault
A fracture or a zone of fractures along which there has been displacement of the sides relative to one another parallel to the fracture. (Source: BJGEO)
[http://www.eionet.europa.eu/gemet/alphabetic?langcode=en]Тематики
EN
DE
FR
сбой
Самоустраняющийся отказ или однократный отказ, устраняемый незначительным вмешательством оператора.
[ ГОСТ 27.002-89]
[ОСТ 45.153-99]
[СТО Газпром РД 2.5-141-2005]
сбой
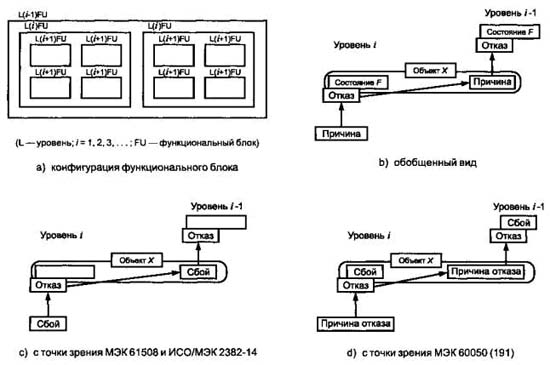
Ненормальный режим, который может вызвать уменьшение или потерю способности функционального блока выполнять требуемую функцию.
Примечание
МЭС 191-05-01 определяет «сбой» как состояние, характеризуемое неспособностью выполнить необходимую функцию, исключая неспособности, возникающие во время профилактического ухода или других плановых мероприятий, либо в результате недостатка внешних ресурсов. Иллюстрация к этим двум точкам зрения показана на рисунке [ ИСО / МЭК 2382-14-01-10].
[ ГОСТ Р МЭК 61508-4-2007]Тематики
- газораспределение
- надежность средств электросвязи
- надежность, основные понятия
Обобщающие термины
EN
сброс
Разрывное нарушение, при котором сместитель падает в сторону опущенного крыла (висячее крыло опущено относительно лежачего).
[ Словарь геологических терминов и понятий. Томский Государственный Университет]Тематики
- геология, геофизика
Обобщающие термины
EN
сверхток
Любой ток, превышающий номинальный
МЭК 60050(441-11-06).
[ ГОСТ Р 50030. 1-2000 ( МЭК 60947-1-99)]
[ ГОСТ Р 50345-99( МЭК 60898-95)]
сверхток
Электрический ток, превышающий номинальный электрический ток.
Сверхток представляет собой любой электрический ток, величина которого превышает номинальный ток какого-либо элемента электроустановки здания или используемого в ней электрооборудования, например: номинальный ток электрической цепи, допустимый длительный ток проводника, номинальный ток автоматического выключателя и т. д. В нормативной и правовой документации различают два основных вида сверхтока – ток перегрузки и ток короткого замыкания.
Появление сверхтока в каком-либо элементе электроустановки здания может привести к его перегреву, возгоранию и, как следствие, к возникновению пожара в здании. Поэтому в электроустановках зданий выполняют защиту от сверхтока.
[ http://www.volt-m.ru/glossary/letter/%D1/view/59/]
сверхток
сверхток в электротехническом изделии
Ток, значение которого превосходит наибольшее рабочее значение тока электротехнического изделия (устройства).
[ ГОСТ 18311-80]
сверхток
Электрический ток, превышающий номинальный электрический ток.
Примечание - Для проводников номинальный ток считается равным длительному допустимому току.
[ ГОСТ Р МЭК 60050-826-2009]
Сверхток может оказывать или может не оказывать вредные воздействия в зависимости от его величины и продолжительности. Сверхтоки могут возникать в результате перегрузок в электроприемниках или при повреждениях, таких как короткие замыкания или замыканиях на землю
[ ГОСТ Р 50571. 1-2009 ( МЭК 60364-1: 2005)]
сверхток
Любой ток, превышающий номинальное значение. Для проводов номинальным значением является допустимый ток.
[ ГОСТ Р МЭК 60204-1-2007]EN
overcurrent
electric current exceeding the rated electric current
NOTE – For conductors, the rated current is considered as equal to the current-carrying capacity
[IEV number 826-11-14]
over-current
<>current exceeding the rated current
<>[IEC 61095, ed. 2.0 (2009-02)]
over-current
electric current the value of which exceeds a specified limiting value
[IEV number 151-15-28]
[IEV number 442-01-20]FR
surintensité, f
courant électrique supérieur au courant électrique assigné
NOTE – Pour des conducteurs, on considère que le courant assigné est égal au courant admissible.
[IEV number 826-11-14]
surintensité
courant supérieur au courant assigné
[IEC 61095, ed. 2.0 (2009-02)]
[IEV number 442-01-20]
surintensité, f
courant électrique dont la valeur dépasse une valeur limite spécifiée
[IEV number 151-15-28]Параллельные тексты EN-RU The design of LV installations leads to basic protection devices being fitted for three types of faults:
-
overloads
-
short-circuits
-
insulation faults
Низковольтные электроустановки должны быть оснащены устройствами защиты трех типов:
-
от перегрузки;
-
от короткого замыкания;
- от токов утечки.
[Перевод Интент]
Примечание.
Слово fault в данном случае пришлось опустить, поскольку:
- его нельзя перевести как "неисправность", т. к. возникновение перегрузки ( overload) не является неисправностью;
- его нельзя перевести как "сверхток", т. к. ток утечки не является сверхтоком.The chosen switchgear must withstand and eliminate faults at optimised cost with respect to the necessary performance.
[Schneider Electric]Выбранная аппаратура распределения должна иметь такие характеристики, чтобы рентабельно выдерживать и ограничивать сверхтоки.
[Перевод Интент]Тематики
Синонимы
EN
DE
FR
ток повреждения
Ток, возникающий в результате пробоя или перекрытия изоляции.
[ ГОСТ Р 51321. 1-2000 ( МЭК 60439-1-92)]
ток повреждения
Ток, который протекает через данную точку повреждения в результате повреждения изоляции.
[ ГОСТ Р МЭК 60050-826-2009]EN
fault current
current resulting from an insulation failure, the bridging of insulation or incorrect connection in an electrical circuit
[IEC 61439-1, ed. 2.0 (2011-08)]
fault current
current which flows across a given point of fault resulting from an insulation fault
[IEV number 826-11-11]FR
courant de défaut
courant résultant d'un défaut de l'isolation, du contournement de l’isolation ou d’un raccordement incorrect dans un circuit électrique
[IEC 61439-1, ed. 2.0 (2011-08)]
courant de défaut, m
courant s'écoulant en un point de défaut donné, consécutivement à un défaut de l'isolation
[IEV number 826-11-11]Тематики
EN
DE
- Fehlerstrom, m
FR
- courant de défaut, m
3.7.2 повреждение (fault): Повреждение любого элемента, разделения, изоляции или соединения между элементами, не являющимися по настоящему стандарту не повреждаемыми, от которых зависит искробезопасность цепи.
Источник: ГОСТ Р 52350.11-2005: Электрооборудование для взрывоопасных газовых сред. Часть 11. Искробезопасная электрическая цепь "I" оригинал документа
3.16 неисправность (fault): Состояние объекта, характеризующееся неспособностью исполнять требуемую функцию, исключая время профилактического технического обслуживания или других запланированных действий, или простои из-за недостатка внешних ресурсов
Примечание - Неисправность часто является результатом отказа объекта, но может существовать и без отказа.
Источник: ГОСТ Р 51901.6-2005: Менеджмент риска. Программа повышения надежности оригинал документа
3.6 неисправность (fault): Состояние элемента, характеризующееся неспособностью исполнять требуемую функцию, исключая период технического обслуживания, ремонта или других запланированных действий, а также из-за недостатка внешних ресурсов.
Примечание - Неисправность часто является результатом отказа элемента, но может существовать и без предшествующего отказа.
Источник: ГОСТ Р 51901.5-2005: Менеджмент риска. Руководство по применению методов анализа надежности оригинал документа
3.5 неисправность (fault): Состояние объекта, когда один из его элементов или группа элементов проявляют признаки деградации или нарушения работы, что может привести к отказу машины.
Примечания
1 Неисправность часто является следствием отказа, но может иметь место и при его отсутствии.
2 Состояние объекта не рассматривают как неисправное, если оно возникло вследствие запланированных процедур или нехватки внешних ресурсов.
Источник: ГОСТ Р ИСО 13379-2009: Контроль состояния и диагностика машин. Руководство по интерпретации данных и методам диагностирования оригинал документа
3.3 неисправность (fault): Состояние объекта, при котором он не способен выполнять требуемую функцию, за исключением такой неспособности при техническом обслуживании или других плановых мероприятиях или вследствие нехватки внешних ресурсов.
Примечания
1 Неисправность часто является следствием отказа объекта, но может иметь место и без него.
2 В настоящем стандарте термин «неисправность» используется наряду с термином «отказ» по историческим причинам.
Источник: ГОСТ Р 51901.12-2007: Менеджмент риска. Метод анализа видов и последствий отказов оригинал документа
3.1.30 ошибка (fault): Разность между погрешностью весоизмерительного датчика и основной погрешностью весоизмерительного датчика (см. 3.1.34).
Источник: ГОСТ Р 8.726-2010: Государственная система обеспечения единства измерений. Датчики весоизмерительные. Общие технические требования. Методы испытаний оригинал документа
3.6 дефект (fault): Неисправность или ошибка в компоненте технического обеспечения, программного обеспечения или системы
[МЭК 61513, пункт 3.22]
Примечание 1 - Дефекты могут подразделяться на случайные, например, в результате ухудшения аппаратных средств из-за старения, и систематические, например, ошибки в программном обеспечении, которые вытекают из погрешностей проектирования.
Примечание 2 - Дефект (в особенности дефект проекта) может остаться необнаруженным в системе до тех пор, пока не окажется, что полученный результат не соответствует намеченной функции, то есть возникает отказ.
Примечание 3 - См. также «ошибка программного обеспечения» и «случайный дефект».
Источник: ГОСТ Р МЭК 62340-2011: Атомные станции. Системы контроля и управления, важные для безопасности. Требования по предотвращению отказов по общей причине оригинал документа
3.2 неисправность (fault): Состояние объекта, когда один из его элементов или группа элементов проявляет признаки деградации или нарушения работы, что может привести к отказу машины.
Примечание - Неисправность может привести к отказу.
Источник: ГОСТ Р ИСО 17359-2009: Контроль состояния и диагностика машин. Общее руководство по организации контроля состояния и диагностирования оригинал документа
3.17 дефект (fault): Неисправность или ошибка в компоненте технического обеспечения, программного обеспечения или системы.
[МЭК 61513, пункт 3.22]
Источник: ГОСТ Р МЭК 60880-2010: Атомные электростанции. Системы контроля и управления, важные для безопасности. Программное обеспечение компьютерных систем, выполняющих функции категории А оригинал документа
3.6.1 сбой (fault): Ненормальный режим, который может вызвать уменьшение или потерю способности функционального блока выполнять требуемую функцию.
Примечание - МЭС 191-05-01 определяет «сбой» как состояние, характеризуемое неспособностью выполнить необходимую функцию, исключая неспособности, возникающие во время профилактического ухода или других плановых мероприятий, либо в результате недостатка внешних ресурсов. Иллюстрация к этим двум точкам зрения показана на рисунке 4 [ИСО/МЭК 2382-14-01-10].
Источник: ГОСТ Р МЭК 61508-4-2007: Функциональная безопасность систем электрических, электронных, программируемых электронных, связанных с безопасностью. Часть 4. Термины и определения оригинал документа
3.22 дефект (fault): Дефект в аппаратуре, программном обеспечении или в компоненте системы (см. рисунок 3).
Примечание 1 -Дефекты могут быть результатом случайных отказов, которые возникают, например, из-за деградации аппаратуры в результате старения; возможны систематические дефекты, например, в результате дефектов в программном обеспечении, возникающих из-за ошибок при проектировании.
Примечание 2 - Дефект (особенно дефекты, связанные с проектированием) может оставаться незамеченным, пока сохраняются условия, при которых он не отражается на выполнении функции, т.е. пока не произойдет отказ.
Примечание 3 - См. также «дефект программного обеспечения».
Источник: ГОСТ Р МЭК 61513-2011: Атомные станции. Системы контроля и управления, важные для безопасности. Общие требования оригинал документа
4.10.1 ошибка (fault): Разность между погрешностью показаний и погрешностью прибора.
Источник: ГОСТ Р ЕН 1434-1-2011: Теплосчетчики. Часть 1. Общие требования
Англо-русский словарь нормативно-технической терминологии > fault
13 man-machine communication
связь человек-машина
—
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
человеко-машинный интерфейс (ЧМИ)
Технические средства, предназначенные для обеспечения непосредственного взаимодействия между оператором и оборудованием и дающие возможность оператору управлять оборудованием и контролировать его функционирование.
Примечание
Такие средства могут включать приводимые в действие вручную органы управления, контрольные устройства, дисплеи.
[ ГОСТ Р МЭК 60447-2000]
человекомашинный интерфейс (ЧМИ)
Технические средства контроля и управления, являющиеся частью оборудования, предназначенные для обеспечения непосредственного взаимодействия между оператором и оборудованием и дающие возможность оператору управлять оборудованием и контролировать его функционирование (ГОСТ Р МЭК 60447).
Примечание
Такие средства могут включать приводимые в действие вручную органы управления, контрольные устройства и дисплеи.
[ ГОСТ Р МЭК 60073-2000]
человеко-машинный интерфейс
Средства обеспечения двусторонней связи "оператор - технологическое оборудование" (АСУ ТП). Название класса средств, в который входят подклассы:
SCADA (Supervisory Control and Data Acquisition) - Операторское управление и сбор данных от технологического оборудования.
DCS (Distributed Control Systems) - Распределенная система управления технологическим оборудованием.
[ http://www.morepc.ru/dict/]Параллельные тексты EN-RU
MotorSys™ iPMCC solutions can integrate a dedicated human-machine interface (HMI) or communicate via a personal computer directly on the motor starters.
[Schneider Electric]Интеллектуальный центр распределения электроэнергии и управления электродвигателями MotorSys™ может иметь в своем составе специальный человеко-машинный интерфейс (ЧМИ). В качестве альтернативы используется обмен данным между персональным компьютером и пускателями.
[Перевод Интент]
HMI на базе операторских станций
Самое, пожалуй, главное в системе управления - это организация взаимодействия между человеком и программно-аппаратным комплексом. Обеспечение такого взаимодействия и есть задача человеко-машинного интерфейса (HMI, human machine interface).
На мой взгляд, в аббревиатуре “АСУ ТП” ключевым является слово “автоматизированная”, что подразумевает непосредственное участие человека в процессе реализации системой определенных задач. Очевидно, что чем лучше организован HMI, тем эффективнее человек сможет решать поставленные задачи.
Как же организован HMI в современных АСУ ТП?
Существует, как минимум, два подхода реализации функционала HMI:- На базе специализированных рабочих станций оператора, устанавливаемых в центральной диспетчерской;
- На базе панелей локального управления, устанавливаемых непосредственно в цеху по близости с контролируемым технологическим объектам.
Иногда эти два варианта комбинируют, чтобы достичь наибольшей гибкости управления. В данной статье речь пойдет о первом варианте организации операторского уровня.
Аппаратно рабочая станция оператора (OS, operator station) представляет собой ни что иное как персональный компьютер. Как правило, станция снабжается несколькими широкоэкранными мониторами, функциональной клавиатурой и необходимыми сетевыми адаптерами для подключения к сетям верхнего уровня (например, на базе Industrial Ethernet). Станция оператора несколько отличается от привычных для нас офисных компьютеров, прежде всего, своим исполнением и эксплуатационными характеристиками (а также ценой 4000 - 10 000 долларов).
На рисунке 1 изображена рабочая станция оператора системы SIMATIC PCS7 производства Siemens, обладающая следующими техническими характеристиками:
Процессор: Intel Pentium 4, 3.4 ГГц;
Память: DDR2 SDRAM до 4 ГБ;
Материнская плата: ChipSet Intel 945G;
Жесткий диск: SATA-RAID 1/2 x 120 ГБ;
Слоты: 4 x PCI, 2 x PCI E x 1, 1 x PCI E x 16;
Степень защиты: IP 31;
Температура при эксплуатации: 5 – 45 C;
Влажность: 5 – 95 % (без образования конденсата);
Операционная система: Windows XP Professional/2003 Server.
Рис. 1. Пример промышленной рабочей станции оператора.Системный блок может быть как настольного исполнения ( desktop), так и для монтажа в 19” стойку ( rack-mounted). Чаще применяется второй вариант: системный блок монтируется в запираемую стойку для лучшей защищенности и предотвращения несанкционированного доступа.
Какое программное обеспечение используется?
На станции оператора устанавливается программный пакет визуализации технологического процесса (часто называемый SCADA). Большинство пакетов визуализации работают под управлением операционных систем семейства Windows (Windows NT 4.0, Windows 2000/XP, Windows 2003 Server), что, на мой взгляд, является большим минусом.
Программное обеспечение визуализации призвано выполнять следующие задачи:- Отображение технологической информации в удобной для человека графической форме (как правило, в виде интерактивных мнемосхем) – Process Visualization;
- Отображение аварийных сигнализаций технологического процесса – Alarm Visualization;
- Архивирование технологических данных (сбор истории процесса) – Historical Archiving;
- Предоставление оператору возможности манипулировать (управлять) объектами управления – Operator Control.
- Контроль доступа и протоколирование действий оператора – Access Control and Operator’s Actions Archiving.
- Автоматизированное составление отчетов за произвольный интервал времени (посменные отчеты, еженедельные, ежемесячные и т.д.) – Automated Reporting.
Как правило, SCADA состоит из двух частей:
- Среды разработки, где инженер рисует и программирует технологические мнемосхемы;
- Среды исполнения, необходимой для выполнения сконфигурированных мнемосхем в режиме runtime. Фактически это режим повседневной эксплуатации.
Существует две схемы подключения операторских станций к системе управления, а точнее уровню управления. В рамках первой схемы каждая операторская станция подключается к контроллерам уровня управления напрямую или с помощью промежуточного коммутатора (см. рисунок 2). Подключенная таким образом операторская станция работает независимо от других станций сети, и поэтому часто называется одиночной (пусть Вас не смущает такое название, на самом деле таких станций в сети может быть несколько).
Рис. 2. Схема подключения одиночных операторских станций к уровню управления.Есть и другой вариант. Часто операторские станции подключают к серверу или резервированной паре серверов, а серверы в свою очередь подключаются к промышленным контроллерам. Таким образом, сервер, являясь неким буфером, постоянно считывает данные с контроллера и предоставляет их по запросу рабочим станциям. Станции, подключенные по такой схеме, часто называют клиентами (см. рисунок 3).
Как происходит информационный обмен?
Рис. 3. Клиент-серверная архитектура операторского уровня.
Для сопряжения операторской станции с промышленным контроллером на первой устанавливается специальное ПО, называемое драйвером ввода/вывода. Драйвер ввода/вывода поддерживает совместимый с контроллером коммуникационный протокол и позволяет прикладным программам считывать с контроллера параметры или наоборот записывать в него. Пакет визуализации обращается к драйверу ввода/вывода каждый раз, когда требуется обновление отображаемой информации или запись измененных оператором данных. Для взаимодействия пакета визуализации и драйвера ввода/вывода используется несколько протоколов, наиболее популярные из которых OPC (OLE for Process Control) и NetDDE (Network Dynamic Data Exchange). Обобщенно можно сказать, что OPC и NetDDE – это протоколы информационного обмена между различными приложениями, которые могут выполняться как на одном, так и на разных компьютерах. На рисунках 4 и 5 изображено, как взаимодействуют программные компоненты при различных схемах построения операторского уровня.
Рис. 4. Схема взаимодействия программных модулей при использовании одиночных станций.
Рис. 5. Схема взаимодействия программных модулей при использовании клиент-серверной архитектуры.
Как выглядит SCADA?
Разберем простой пример. На рисунке 6 приведена абстрактная схема технологического процесса, хотя полноценным процессом это назвать трудно.
Рис. 6. Пример операторской мнемосхемы.
На рисунке 6 изображен очень упрощенный вариант операторской мнемосхемы для управления тех. процессом. Как видно, резервуар (емкость) наполняется водой. Задача системы - нагреть эту воду до определенной температуры. Для нагрева воды используется газовая горелка. Интенсивность горения регулируется клапаном подачи газа. Также должен быть насос для закачки воды в резервуар и клапан для спуска воды.
На мнемосхеме отображаются основные технологические параметры, такие как: температура воды; уровень воды в резервуаре; работа насосов; состояние клапанов и т.д. Эти данные обновляются на экране с заданной частотой. Если какой-либо параметр достигает аварийного значения, соответствующее поле начинает мигать, привлекая внимание оператора.
Сигналы ввода/вывода и исполнительные механизмы отображаются на мнемосхемах в виде интерактивных графических символов (иконок). Каждому типу сигналов и исполнительных механизмов присваивается свой символ: для дискретного сигнала это может быть переключатель, кнопка или лампочка; для аналогового – ползунок, диаграмма или текстовое поле; для двигателей и насосов – более сложные фейсплейты ( faceplates). Каждый символ, как правило, представляет собой отдельный ActiveX компонент. Вообще технология ActiveX широко используется в SCADA-пакетах, так как позволяет разработчику подгружать дополнительные символы, не входящие в стандартную библиотеку, а также разрабатывать свои собственные графические элементы, используя высокоуровневые языки программирования.
Допустим, оператор хочет включить насос. Для этого он щелкает по его иконке и вызывает панель управления ( faceplate). На этой панели он может выполнить определенные манипуляции: включить или выключить насос, подтвердить аварийную сигнализацию, перевести его в режим “техобслуживания” и т.д. (см. рисунок 7).
Рис. 7. Пример фейсплейта для управления насосом.Оператор также может посмотреть график изменения интересующего его технологического параметра, например, за прошедшую неделю. Для этого ему надо вызвать тренд ( trend) и выбрать соответствующий параметр для отображения. Пример тренда реального времени показан на рисунке 8.
Рис. 8. Пример отображения двух параметров на тренде реального времени.
Для более детального обзора сообщений и аварийных сигнализаций оператор может воспользоваться специальной панелью ( alarm panel), пример которой изображен на рисунке 9. Это отсортированный список сигнализаций (alarms), представленный в удобной для восприятия форме. Оператор может подтвердить ту или иную аварийную сигнализацию, применить фильтр или просто ее скрыть.
Рис. 9. Панель сообщений и аварийных сигнализаций.
Говоря о SCADA, инженеры часто оперируют таким важным понятием как “тэг” ( tag). Тэг является по существу некой переменной программы визуализации и может быть использован как для локального хранения данных внутри программы, так и в качестве ссылки на внешний параметр процесса. Тэги могут быть разных типов, начиная от обычных числовых данных и кончая структурой с множеством полей. Например, один визуализируемый параметр ввода/вывода – это тэг, или функциональный блок PID-регулятора, выполняемый внутри контроллера, - это тоже тэг. Ниже представлена сильно упрощенная структура тэга, соответствующего простому PID-регулятору:
Tag Name = “MyPID”;
Tag Type = PID;
Fields (список параметров):
MyPID.OP
MyPID.SP
MyPID.PV
MyPID.PR
MyPID.TI
MyPID.DI
MyPID.Mode
MyPID.RemoteSP
MyPID.Alarms и т.д.
В комплексной прикладной программе может быть несколько тысяч тэгов. Производители SCADA-пакетов это знают и поэтому применяют политику лицензирования на основе количества используемых тэгов. Каждая купленная лицензия жестко ограничивает суммарное количество тэгов, которые можно использовать в программе. Очевидно, чем больше тегов поддерживает лицензия, тем дороже она стоит; так, например, лицензия на 60 000 тэгов может обойтись в 5000 тыс. долларов или даже дороже. В дополнение к этому многие производители SCADA формируют весьма существенную разницу в цене между “голой” средой исполнения и полноценной средой разработки; естественно, последняя с таким же количеством тэгов будет стоить заметно дороже.
Сегодня на рынке представлено большое количество различных SCADA-пакетов, наиболее популярные из которых представлены ниже:
1. Wonderware Intouch;
2. Simatic WinCC;
3. Iconics Genesis32;
4. Citect;
5. Adastra Trace Mode
Лидирующие позиции занимают Wonderware Intouch (производства Invensys) и Simatic WinCC (разработки Siemens) с суммарным количеством инсталляций более 80 тыс. в мире. Пакет визуализации технологического процесса может поставляться как в составе комплексной системы управления, так и в виде отдельного программного продукта. В последнем случае SCADA комплектуется набором драйверов ввода/вывода для коммуникации с контроллерами различных производителей. [ http://kazanets.narod.ru/HMI_PART1.htm]Тематики
- автоматизация, основные понятия
- автоматизированные системы
Синонимы
EN
Англо-русский словарь нормативно-технической терминологии > man-machine communication
14 man-machine interface
- человеко-машинный интерфейс
- интерфейс "человекмашина"
интерфейс "человекмашина"
(МСЭ-Т Q.1741).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
человеко-машинный интерфейс (ЧМИ)
Технические средства, предназначенные для обеспечения непосредственного взаимодействия между оператором и оборудованием и дающие возможность оператору управлять оборудованием и контролировать его функционирование.
Примечание
Такие средства могут включать приводимые в действие вручную органы управления, контрольные устройства, дисплеи.
[ ГОСТ Р МЭК 60447-2000]
человекомашинный интерфейс (ЧМИ)
Технические средства контроля и управления, являющиеся частью оборудования, предназначенные для обеспечения непосредственного взаимодействия между оператором и оборудованием и дающие возможность оператору управлять оборудованием и контролировать его функционирование (ГОСТ Р МЭК 60447).
Примечание
Такие средства могут включать приводимые в действие вручную органы управления, контрольные устройства и дисплеи.
[ ГОСТ Р МЭК 60073-2000]
человеко-машинный интерфейс
Средства обеспечения двусторонней связи "оператор - технологическое оборудование" (АСУ ТП). Название класса средств, в который входят подклассы:
SCADA (Supervisory Control and Data Acquisition) - Операторское управление и сбор данных от технологического оборудования.
DCS (Distributed Control Systems) - Распределенная система управления технологическим оборудованием.
[ http://www.morepc.ru/dict/]Параллельные тексты EN-RU
MotorSys™ iPMCC solutions can integrate a dedicated human-machine interface (HMI) or communicate via a personal computer directly on the motor starters.
[Schneider Electric]Интеллектуальный центр распределения электроэнергии и управления электродвигателями MotorSys™ может иметь в своем составе специальный человеко-машинный интерфейс (ЧМИ). В качестве альтернативы используется обмен данным между персональным компьютером и пускателями.
[Перевод Интент]
HMI на базе операторских станций
Самое, пожалуй, главное в системе управления - это организация взаимодействия между человеком и программно-аппаратным комплексом. Обеспечение такого взаимодействия и есть задача человеко-машинного интерфейса (HMI, human machine interface).
На мой взгляд, в аббревиатуре “АСУ ТП” ключевым является слово “автоматизированная”, что подразумевает непосредственное участие человека в процессе реализации системой определенных задач. Очевидно, что чем лучше организован HMI, тем эффективнее человек сможет решать поставленные задачи.
Как же организован HMI в современных АСУ ТП?
Существует, как минимум, два подхода реализации функционала HMI:- На базе специализированных рабочих станций оператора, устанавливаемых в центральной диспетчерской;
- На базе панелей локального управления, устанавливаемых непосредственно в цеху по близости с контролируемым технологическим объектам.
Иногда эти два варианта комбинируют, чтобы достичь наибольшей гибкости управления. В данной статье речь пойдет о первом варианте организации операторского уровня.
Аппаратно рабочая станция оператора (OS, operator station) представляет собой ни что иное как персональный компьютер. Как правило, станция снабжается несколькими широкоэкранными мониторами, функциональной клавиатурой и необходимыми сетевыми адаптерами для подключения к сетям верхнего уровня (например, на базе Industrial Ethernet). Станция оператора несколько отличается от привычных для нас офисных компьютеров, прежде всего, своим исполнением и эксплуатационными характеристиками (а также ценой 4000 - 10 000 долларов).
На рисунке 1 изображена рабочая станция оператора системы SIMATIC PCS7 производства Siemens, обладающая следующими техническими характеристиками:
Процессор: Intel Pentium 4, 3.4 ГГц;
Память: DDR2 SDRAM до 4 ГБ;
Материнская плата: ChipSet Intel 945G;
Жесткий диск: SATA-RAID 1/2 x 120 ГБ;
Слоты: 4 x PCI, 2 x PCI E x 1, 1 x PCI E x 16;
Степень защиты: IP 31;
Температура при эксплуатации: 5 – 45 C;
Влажность: 5 – 95 % (без образования конденсата);
Операционная система: Windows XP Professional/2003 Server.
Рис. 1. Пример промышленной рабочей станции оператора.Системный блок может быть как настольного исполнения ( desktop), так и для монтажа в 19” стойку ( rack-mounted). Чаще применяется второй вариант: системный блок монтируется в запираемую стойку для лучшей защищенности и предотвращения несанкционированного доступа.
Какое программное обеспечение используется?
На станции оператора устанавливается программный пакет визуализации технологического процесса (часто называемый SCADA). Большинство пакетов визуализации работают под управлением операционных систем семейства Windows (Windows NT 4.0, Windows 2000/XP, Windows 2003 Server), что, на мой взгляд, является большим минусом.
Программное обеспечение визуализации призвано выполнять следующие задачи:- Отображение технологической информации в удобной для человека графической форме (как правило, в виде интерактивных мнемосхем) – Process Visualization;
- Отображение аварийных сигнализаций технологического процесса – Alarm Visualization;
- Архивирование технологических данных (сбор истории процесса) – Historical Archiving;
- Предоставление оператору возможности манипулировать (управлять) объектами управления – Operator Control.
- Контроль доступа и протоколирование действий оператора – Access Control and Operator’s Actions Archiving.
- Автоматизированное составление отчетов за произвольный интервал времени (посменные отчеты, еженедельные, ежемесячные и т.д.) – Automated Reporting.
Как правило, SCADA состоит из двух частей:
- Среды разработки, где инженер рисует и программирует технологические мнемосхемы;
- Среды исполнения, необходимой для выполнения сконфигурированных мнемосхем в режиме runtime. Фактически это режим повседневной эксплуатации.
Существует две схемы подключения операторских станций к системе управления, а точнее уровню управления. В рамках первой схемы каждая операторская станция подключается к контроллерам уровня управления напрямую или с помощью промежуточного коммутатора (см. рисунок 2). Подключенная таким образом операторская станция работает независимо от других станций сети, и поэтому часто называется одиночной (пусть Вас не смущает такое название, на самом деле таких станций в сети может быть несколько).
Рис. 2. Схема подключения одиночных операторских станций к уровню управления.Есть и другой вариант. Часто операторские станции подключают к серверу или резервированной паре серверов, а серверы в свою очередь подключаются к промышленным контроллерам. Таким образом, сервер, являясь неким буфером, постоянно считывает данные с контроллера и предоставляет их по запросу рабочим станциям. Станции, подключенные по такой схеме, часто называют клиентами (см. рисунок 3).
Как происходит информационный обмен?
Рис. 3. Клиент-серверная архитектура операторского уровня.
Для сопряжения операторской станции с промышленным контроллером на первой устанавливается специальное ПО, называемое драйвером ввода/вывода. Драйвер ввода/вывода поддерживает совместимый с контроллером коммуникационный протокол и позволяет прикладным программам считывать с контроллера параметры или наоборот записывать в него. Пакет визуализации обращается к драйверу ввода/вывода каждый раз, когда требуется обновление отображаемой информации или запись измененных оператором данных. Для взаимодействия пакета визуализации и драйвера ввода/вывода используется несколько протоколов, наиболее популярные из которых OPC (OLE for Process Control) и NetDDE (Network Dynamic Data Exchange). Обобщенно можно сказать, что OPC и NetDDE – это протоколы информационного обмена между различными приложениями, которые могут выполняться как на одном, так и на разных компьютерах. На рисунках 4 и 5 изображено, как взаимодействуют программные компоненты при различных схемах построения операторского уровня.
Рис. 4. Схема взаимодействия программных модулей при использовании одиночных станций.
Рис. 5. Схема взаимодействия программных модулей при использовании клиент-серверной архитектуры.
Как выглядит SCADA?
Разберем простой пример. На рисунке 6 приведена абстрактная схема технологического процесса, хотя полноценным процессом это назвать трудно.
Рис. 6. Пример операторской мнемосхемы.
На рисунке 6 изображен очень упрощенный вариант операторской мнемосхемы для управления тех. процессом. Как видно, резервуар (емкость) наполняется водой. Задача системы - нагреть эту воду до определенной температуры. Для нагрева воды используется газовая горелка. Интенсивность горения регулируется клапаном подачи газа. Также должен быть насос для закачки воды в резервуар и клапан для спуска воды.
На мнемосхеме отображаются основные технологические параметры, такие как: температура воды; уровень воды в резервуаре; работа насосов; состояние клапанов и т.д. Эти данные обновляются на экране с заданной частотой. Если какой-либо параметр достигает аварийного значения, соответствующее поле начинает мигать, привлекая внимание оператора.
Сигналы ввода/вывода и исполнительные механизмы отображаются на мнемосхемах в виде интерактивных графических символов (иконок). Каждому типу сигналов и исполнительных механизмов присваивается свой символ: для дискретного сигнала это может быть переключатель, кнопка или лампочка; для аналогового – ползунок, диаграмма или текстовое поле; для двигателей и насосов – более сложные фейсплейты ( faceplates). Каждый символ, как правило, представляет собой отдельный ActiveX компонент. Вообще технология ActiveX широко используется в SCADA-пакетах, так как позволяет разработчику подгружать дополнительные символы, не входящие в стандартную библиотеку, а также разрабатывать свои собственные графические элементы, используя высокоуровневые языки программирования.
Допустим, оператор хочет включить насос. Для этого он щелкает по его иконке и вызывает панель управления ( faceplate). На этой панели он может выполнить определенные манипуляции: включить или выключить насос, подтвердить аварийную сигнализацию, перевести его в режим “техобслуживания” и т.д. (см. рисунок 7).
Рис. 7. Пример фейсплейта для управления насосом.Оператор также может посмотреть график изменения интересующего его технологического параметра, например, за прошедшую неделю. Для этого ему надо вызвать тренд ( trend) и выбрать соответствующий параметр для отображения. Пример тренда реального времени показан на рисунке 8.
Рис. 8. Пример отображения двух параметров на тренде реального времени.
Для более детального обзора сообщений и аварийных сигнализаций оператор может воспользоваться специальной панелью ( alarm panel), пример которой изображен на рисунке 9. Это отсортированный список сигнализаций (alarms), представленный в удобной для восприятия форме. Оператор может подтвердить ту или иную аварийную сигнализацию, применить фильтр или просто ее скрыть.
Рис. 9. Панель сообщений и аварийных сигнализаций.
Говоря о SCADA, инженеры часто оперируют таким важным понятием как “тэг” ( tag). Тэг является по существу некой переменной программы визуализации и может быть использован как для локального хранения данных внутри программы, так и в качестве ссылки на внешний параметр процесса. Тэги могут быть разных типов, начиная от обычных числовых данных и кончая структурой с множеством полей. Например, один визуализируемый параметр ввода/вывода – это тэг, или функциональный блок PID-регулятора, выполняемый внутри контроллера, - это тоже тэг. Ниже представлена сильно упрощенная структура тэга, соответствующего простому PID-регулятору:
Tag Name = “MyPID”;
Tag Type = PID;
Fields (список параметров):
MyPID.OP
MyPID.SP
MyPID.PV
MyPID.PR
MyPID.TI
MyPID.DI
MyPID.Mode
MyPID.RemoteSP
MyPID.Alarms и т.д.
В комплексной прикладной программе может быть несколько тысяч тэгов. Производители SCADA-пакетов это знают и поэтому применяют политику лицензирования на основе количества используемых тэгов. Каждая купленная лицензия жестко ограничивает суммарное количество тэгов, которые можно использовать в программе. Очевидно, чем больше тегов поддерживает лицензия, тем дороже она стоит; так, например, лицензия на 60 000 тэгов может обойтись в 5000 тыс. долларов или даже дороже. В дополнение к этому многие производители SCADA формируют весьма существенную разницу в цене между “голой” средой исполнения и полноценной средой разработки; естественно, последняя с таким же количеством тэгов будет стоить заметно дороже.
Сегодня на рынке представлено большое количество различных SCADA-пакетов, наиболее популярные из которых представлены ниже:
1. Wonderware Intouch;
2. Simatic WinCC;
3. Iconics Genesis32;
4. Citect;
5. Adastra Trace Mode
Лидирующие позиции занимают Wonderware Intouch (производства Invensys) и Simatic WinCC (разработки Siemens) с суммарным количеством инсталляций более 80 тыс. в мире. Пакет визуализации технологического процесса может поставляться как в составе комплексной системы управления, так и в виде отдельного программного продукта. В последнем случае SCADA комплектуется набором драйверов ввода/вывода для коммуникации с контроллерами различных производителей. [ http://kazanets.narod.ru/HMI_PART1.htm]Тематики
- автоматизация, основные понятия
- автоматизированные системы
Синонимы
EN
Англо-русский словарь нормативно-технической терминологии > man-machine interface
15 MMI
- человеко-машинный интерфейс
- интерфейс "человекмашина"
интерфейс "человекмашина"
(МСЭ-Т Q.1741).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
человеко-машинный интерфейс (ЧМИ)
Технические средства, предназначенные для обеспечения непосредственного взаимодействия между оператором и оборудованием и дающие возможность оператору управлять оборудованием и контролировать его функционирование.
Примечание
Такие средства могут включать приводимые в действие вручную органы управления, контрольные устройства, дисплеи.
[ ГОСТ Р МЭК 60447-2000]
человекомашинный интерфейс (ЧМИ)
Технические средства контроля и управления, являющиеся частью оборудования, предназначенные для обеспечения непосредственного взаимодействия между оператором и оборудованием и дающие возможность оператору управлять оборудованием и контролировать его функционирование (ГОСТ Р МЭК 60447).
Примечание
Такие средства могут включать приводимые в действие вручную органы управления, контрольные устройства и дисплеи.
[ ГОСТ Р МЭК 60073-2000]
человеко-машинный интерфейс
Средства обеспечения двусторонней связи "оператор - технологическое оборудование" (АСУ ТП). Название класса средств, в который входят подклассы:
SCADA (Supervisory Control and Data Acquisition) - Операторское управление и сбор данных от технологического оборудования.
DCS (Distributed Control Systems) - Распределенная система управления технологическим оборудованием.
[ http://www.morepc.ru/dict/]Параллельные тексты EN-RU
MotorSys™ iPMCC solutions can integrate a dedicated human-machine interface (HMI) or communicate via a personal computer directly on the motor starters.
[Schneider Electric]Интеллектуальный центр распределения электроэнергии и управления электродвигателями MotorSys™ может иметь в своем составе специальный человеко-машинный интерфейс (ЧМИ). В качестве альтернативы используется обмен данным между персональным компьютером и пускателями.
[Перевод Интент]
HMI на базе операторских станций
Самое, пожалуй, главное в системе управления - это организация взаимодействия между человеком и программно-аппаратным комплексом. Обеспечение такого взаимодействия и есть задача человеко-машинного интерфейса (HMI, human machine interface).
На мой взгляд, в аббревиатуре “АСУ ТП” ключевым является слово “автоматизированная”, что подразумевает непосредственное участие человека в процессе реализации системой определенных задач. Очевидно, что чем лучше организован HMI, тем эффективнее человек сможет решать поставленные задачи.
Как же организован HMI в современных АСУ ТП?
Существует, как минимум, два подхода реализации функционала HMI:- На базе специализированных рабочих станций оператора, устанавливаемых в центральной диспетчерской;
- На базе панелей локального управления, устанавливаемых непосредственно в цеху по близости с контролируемым технологическим объектам.
Иногда эти два варианта комбинируют, чтобы достичь наибольшей гибкости управления. В данной статье речь пойдет о первом варианте организации операторского уровня.
Аппаратно рабочая станция оператора (OS, operator station) представляет собой ни что иное как персональный компьютер. Как правило, станция снабжается несколькими широкоэкранными мониторами, функциональной клавиатурой и необходимыми сетевыми адаптерами для подключения к сетям верхнего уровня (например, на базе Industrial Ethernet). Станция оператора несколько отличается от привычных для нас офисных компьютеров, прежде всего, своим исполнением и эксплуатационными характеристиками (а также ценой 4000 - 10 000 долларов).
На рисунке 1 изображена рабочая станция оператора системы SIMATIC PCS7 производства Siemens, обладающая следующими техническими характеристиками:
Процессор: Intel Pentium 4, 3.4 ГГц;
Память: DDR2 SDRAM до 4 ГБ;
Материнская плата: ChipSet Intel 945G;
Жесткий диск: SATA-RAID 1/2 x 120 ГБ;
Слоты: 4 x PCI, 2 x PCI E x 1, 1 x PCI E x 16;
Степень защиты: IP 31;
Температура при эксплуатации: 5 – 45 C;
Влажность: 5 – 95 % (без образования конденсата);
Операционная система: Windows XP Professional/2003 Server.
Рис. 1. Пример промышленной рабочей станции оператора.Системный блок может быть как настольного исполнения ( desktop), так и для монтажа в 19” стойку ( rack-mounted). Чаще применяется второй вариант: системный блок монтируется в запираемую стойку для лучшей защищенности и предотвращения несанкционированного доступа.
Какое программное обеспечение используется?
На станции оператора устанавливается программный пакет визуализации технологического процесса (часто называемый SCADA). Большинство пакетов визуализации работают под управлением операционных систем семейства Windows (Windows NT 4.0, Windows 2000/XP, Windows 2003 Server), что, на мой взгляд, является большим минусом.
Программное обеспечение визуализации призвано выполнять следующие задачи:- Отображение технологической информации в удобной для человека графической форме (как правило, в виде интерактивных мнемосхем) – Process Visualization;
- Отображение аварийных сигнализаций технологического процесса – Alarm Visualization;
- Архивирование технологических данных (сбор истории процесса) – Historical Archiving;
- Предоставление оператору возможности манипулировать (управлять) объектами управления – Operator Control.
- Контроль доступа и протоколирование действий оператора – Access Control and Operator’s Actions Archiving.
- Автоматизированное составление отчетов за произвольный интервал времени (посменные отчеты, еженедельные, ежемесячные и т.д.) – Automated Reporting.
Как правило, SCADA состоит из двух частей:
- Среды разработки, где инженер рисует и программирует технологические мнемосхемы;
- Среды исполнения, необходимой для выполнения сконфигурированных мнемосхем в режиме runtime. Фактически это режим повседневной эксплуатации.
Существует две схемы подключения операторских станций к системе управления, а точнее уровню управления. В рамках первой схемы каждая операторская станция подключается к контроллерам уровня управления напрямую или с помощью промежуточного коммутатора (см. рисунок 2). Подключенная таким образом операторская станция работает независимо от других станций сети, и поэтому часто называется одиночной (пусть Вас не смущает такое название, на самом деле таких станций в сети может быть несколько).
Рис. 2. Схема подключения одиночных операторских станций к уровню управления.Есть и другой вариант. Часто операторские станции подключают к серверу или резервированной паре серверов, а серверы в свою очередь подключаются к промышленным контроллерам. Таким образом, сервер, являясь неким буфером, постоянно считывает данные с контроллера и предоставляет их по запросу рабочим станциям. Станции, подключенные по такой схеме, часто называют клиентами (см. рисунок 3).
Как происходит информационный обмен?
Рис. 3. Клиент-серверная архитектура операторского уровня.
Для сопряжения операторской станции с промышленным контроллером на первой устанавливается специальное ПО, называемое драйвером ввода/вывода. Драйвер ввода/вывода поддерживает совместимый с контроллером коммуникационный протокол и позволяет прикладным программам считывать с контроллера параметры или наоборот записывать в него. Пакет визуализации обращается к драйверу ввода/вывода каждый раз, когда требуется обновление отображаемой информации или запись измененных оператором данных. Для взаимодействия пакета визуализации и драйвера ввода/вывода используется несколько протоколов, наиболее популярные из которых OPC (OLE for Process Control) и NetDDE (Network Dynamic Data Exchange). Обобщенно можно сказать, что OPC и NetDDE – это протоколы информационного обмена между различными приложениями, которые могут выполняться как на одном, так и на разных компьютерах. На рисунках 4 и 5 изображено, как взаимодействуют программные компоненты при различных схемах построения операторского уровня.
Рис. 4. Схема взаимодействия программных модулей при использовании одиночных станций.
Рис. 5. Схема взаимодействия программных модулей при использовании клиент-серверной архитектуры.
Как выглядит SCADA?
Разберем простой пример. На рисунке 6 приведена абстрактная схема технологического процесса, хотя полноценным процессом это назвать трудно.
Рис. 6. Пример операторской мнемосхемы.
На рисунке 6 изображен очень упрощенный вариант операторской мнемосхемы для управления тех. процессом. Как видно, резервуар (емкость) наполняется водой. Задача системы - нагреть эту воду до определенной температуры. Для нагрева воды используется газовая горелка. Интенсивность горения регулируется клапаном подачи газа. Также должен быть насос для закачки воды в резервуар и клапан для спуска воды.
На мнемосхеме отображаются основные технологические параметры, такие как: температура воды; уровень воды в резервуаре; работа насосов; состояние клапанов и т.д. Эти данные обновляются на экране с заданной частотой. Если какой-либо параметр достигает аварийного значения, соответствующее поле начинает мигать, привлекая внимание оператора.
Сигналы ввода/вывода и исполнительные механизмы отображаются на мнемосхемах в виде интерактивных графических символов (иконок). Каждому типу сигналов и исполнительных механизмов присваивается свой символ: для дискретного сигнала это может быть переключатель, кнопка или лампочка; для аналогового – ползунок, диаграмма или текстовое поле; для двигателей и насосов – более сложные фейсплейты ( faceplates). Каждый символ, как правило, представляет собой отдельный ActiveX компонент. Вообще технология ActiveX широко используется в SCADA-пакетах, так как позволяет разработчику подгружать дополнительные символы, не входящие в стандартную библиотеку, а также разрабатывать свои собственные графические элементы, используя высокоуровневые языки программирования.
Допустим, оператор хочет включить насос. Для этого он щелкает по его иконке и вызывает панель управления ( faceplate). На этой панели он может выполнить определенные манипуляции: включить или выключить насос, подтвердить аварийную сигнализацию, перевести его в режим “техобслуживания” и т.д. (см. рисунок 7).
Рис. 7. Пример фейсплейта для управления насосом.Оператор также может посмотреть график изменения интересующего его технологического параметра, например, за прошедшую неделю. Для этого ему надо вызвать тренд ( trend) и выбрать соответствующий параметр для отображения. Пример тренда реального времени показан на рисунке 8.
Рис. 8. Пример отображения двух параметров на тренде реального времени.
Для более детального обзора сообщений и аварийных сигнализаций оператор может воспользоваться специальной панелью ( alarm panel), пример которой изображен на рисунке 9. Это отсортированный список сигнализаций (alarms), представленный в удобной для восприятия форме. Оператор может подтвердить ту или иную аварийную сигнализацию, применить фильтр или просто ее скрыть.
Рис. 9. Панель сообщений и аварийных сигнализаций.
Говоря о SCADA, инженеры часто оперируют таким важным понятием как “тэг” ( tag). Тэг является по существу некой переменной программы визуализации и может быть использован как для локального хранения данных внутри программы, так и в качестве ссылки на внешний параметр процесса. Тэги могут быть разных типов, начиная от обычных числовых данных и кончая структурой с множеством полей. Например, один визуализируемый параметр ввода/вывода – это тэг, или функциональный блок PID-регулятора, выполняемый внутри контроллера, - это тоже тэг. Ниже представлена сильно упрощенная структура тэга, соответствующего простому PID-регулятору:
Tag Name = “MyPID”;
Tag Type = PID;
Fields (список параметров):
MyPID.OP
MyPID.SP
MyPID.PV
MyPID.PR
MyPID.TI
MyPID.DI
MyPID.Mode
MyPID.RemoteSP
MyPID.Alarms и т.д.
В комплексной прикладной программе может быть несколько тысяч тэгов. Производители SCADA-пакетов это знают и поэтому применяют политику лицензирования на основе количества используемых тэгов. Каждая купленная лицензия жестко ограничивает суммарное количество тэгов, которые можно использовать в программе. Очевидно, чем больше тегов поддерживает лицензия, тем дороже она стоит; так, например, лицензия на 60 000 тэгов может обойтись в 5000 тыс. долларов или даже дороже. В дополнение к этому многие производители SCADA формируют весьма существенную разницу в цене между “голой” средой исполнения и полноценной средой разработки; естественно, последняя с таким же количеством тэгов будет стоить заметно дороже.
Сегодня на рынке представлено большое количество различных SCADA-пакетов, наиболее популярные из которых представлены ниже:
1. Wonderware Intouch;
2. Simatic WinCC;
3. Iconics Genesis32;
4. Citect;
5. Adastra Trace Mode
Лидирующие позиции занимают Wonderware Intouch (производства Invensys) и Simatic WinCC (разработки Siemens) с суммарным количеством инсталляций более 80 тыс. в мире. Пакет визуализации технологического процесса может поставляться как в составе комплексной системы управления, так и в виде отдельного программного продукта. В последнем случае SCADA комплектуется набором драйверов ввода/вывода для коммуникации с контроллерами различных производителей. [ http://kazanets.narod.ru/HMI_PART1.htm]Тематики
- автоматизация, основные понятия
- автоматизированные системы
Синонимы
EN
Англо-русский словарь нормативно-технической терминологии > MMI
16 human interface
интерфейс с пользователем
—
[Л.Г.Суменко. Англо-русский словарь по информационным технологиям. М.: ГП ЦНИИС, 2003.]Тематики
EN
человеко-машинный интерфейс (ЧМИ)
Технические средства, предназначенные для обеспечения непосредственного взаимодействия между оператором и оборудованием и дающие возможность оператору управлять оборудованием и контролировать его функционирование.
Примечание
Такие средства могут включать приводимые в действие вручную органы управления, контрольные устройства, дисплеи.
[ ГОСТ Р МЭК 60447-2000]
человекомашинный интерфейс (ЧМИ)
Технические средства контроля и управления, являющиеся частью оборудования, предназначенные для обеспечения непосредственного взаимодействия между оператором и оборудованием и дающие возможность оператору управлять оборудованием и контролировать его функционирование (ГОСТ Р МЭК 60447).
Примечание
Такие средства могут включать приводимые в действие вручную органы управления, контрольные устройства и дисплеи.
[ ГОСТ Р МЭК 60073-2000]
человеко-машинный интерфейс
Средства обеспечения двусторонней связи "оператор - технологическое оборудование" (АСУ ТП). Название класса средств, в который входят подклассы:
SCADA (Supervisory Control and Data Acquisition) - Операторское управление и сбор данных от технологического оборудования.
DCS (Distributed Control Systems) - Распределенная система управления технологическим оборудованием.
[ http://www.morepc.ru/dict/]Параллельные тексты EN-RU
MotorSys™ iPMCC solutions can integrate a dedicated human-machine interface (HMI) or communicate via a personal computer directly on the motor starters.
[Schneider Electric]Интеллектуальный центр распределения электроэнергии и управления электродвигателями MotorSys™ может иметь в своем составе специальный человеко-машинный интерфейс (ЧМИ). В качестве альтернативы используется обмен данным между персональным компьютером и пускателями.
[Перевод Интент]
HMI на базе операторских станций
Самое, пожалуй, главное в системе управления - это организация взаимодействия между человеком и программно-аппаратным комплексом. Обеспечение такого взаимодействия и есть задача человеко-машинного интерфейса (HMI, human machine interface).
На мой взгляд, в аббревиатуре “АСУ ТП” ключевым является слово “автоматизированная”, что подразумевает непосредственное участие человека в процессе реализации системой определенных задач. Очевидно, что чем лучше организован HMI, тем эффективнее человек сможет решать поставленные задачи.
Как же организован HMI в современных АСУ ТП?
Существует, как минимум, два подхода реализации функционала HMI:- На базе специализированных рабочих станций оператора, устанавливаемых в центральной диспетчерской;
- На базе панелей локального управления, устанавливаемых непосредственно в цеху по близости с контролируемым технологическим объектам.
Иногда эти два варианта комбинируют, чтобы достичь наибольшей гибкости управления. В данной статье речь пойдет о первом варианте организации операторского уровня.
Аппаратно рабочая станция оператора (OS, operator station) представляет собой ни что иное как персональный компьютер. Как правило, станция снабжается несколькими широкоэкранными мониторами, функциональной клавиатурой и необходимыми сетевыми адаптерами для подключения к сетям верхнего уровня (например, на базе Industrial Ethernet). Станция оператора несколько отличается от привычных для нас офисных компьютеров, прежде всего, своим исполнением и эксплуатационными характеристиками (а также ценой 4000 - 10 000 долларов).
На рисунке 1 изображена рабочая станция оператора системы SIMATIC PCS7 производства Siemens, обладающая следующими техническими характеристиками:
Процессор: Intel Pentium 4, 3.4 ГГц;
Память: DDR2 SDRAM до 4 ГБ;
Материнская плата: ChipSet Intel 945G;
Жесткий диск: SATA-RAID 1/2 x 120 ГБ;
Слоты: 4 x PCI, 2 x PCI E x 1, 1 x PCI E x 16;
Степень защиты: IP 31;
Температура при эксплуатации: 5 – 45 C;
Влажность: 5 – 95 % (без образования конденсата);
Операционная система: Windows XP Professional/2003 Server.
Рис. 1. Пример промышленной рабочей станции оператора.Системный блок может быть как настольного исполнения ( desktop), так и для монтажа в 19” стойку ( rack-mounted). Чаще применяется второй вариант: системный блок монтируется в запираемую стойку для лучшей защищенности и предотвращения несанкционированного доступа.
Какое программное обеспечение используется?
На станции оператора устанавливается программный пакет визуализации технологического процесса (часто называемый SCADA). Большинство пакетов визуализации работают под управлением операционных систем семейства Windows (Windows NT 4.0, Windows 2000/XP, Windows 2003 Server), что, на мой взгляд, является большим минусом.
Программное обеспечение визуализации призвано выполнять следующие задачи:- Отображение технологической информации в удобной для человека графической форме (как правило, в виде интерактивных мнемосхем) – Process Visualization;
- Отображение аварийных сигнализаций технологического процесса – Alarm Visualization;
- Архивирование технологических данных (сбор истории процесса) – Historical Archiving;
- Предоставление оператору возможности манипулировать (управлять) объектами управления – Operator Control.
- Контроль доступа и протоколирование действий оператора – Access Control and Operator’s Actions Archiving.
- Автоматизированное составление отчетов за произвольный интервал времени (посменные отчеты, еженедельные, ежемесячные и т.д.) – Automated Reporting.
Как правило, SCADA состоит из двух частей:
- Среды разработки, где инженер рисует и программирует технологические мнемосхемы;
- Среды исполнения, необходимой для выполнения сконфигурированных мнемосхем в режиме runtime. Фактически это режим повседневной эксплуатации.
Существует две схемы подключения операторских станций к системе управления, а точнее уровню управления. В рамках первой схемы каждая операторская станция подключается к контроллерам уровня управления напрямую или с помощью промежуточного коммутатора (см. рисунок 2). Подключенная таким образом операторская станция работает независимо от других станций сети, и поэтому часто называется одиночной (пусть Вас не смущает такое название, на самом деле таких станций в сети может быть несколько).
Рис. 2. Схема подключения одиночных операторских станций к уровню управления.Есть и другой вариант. Часто операторские станции подключают к серверу или резервированной паре серверов, а серверы в свою очередь подключаются к промышленным контроллерам. Таким образом, сервер, являясь неким буфером, постоянно считывает данные с контроллера и предоставляет их по запросу рабочим станциям. Станции, подключенные по такой схеме, часто называют клиентами (см. рисунок 3).
Как происходит информационный обмен?
Рис. 3. Клиент-серверная архитектура операторского уровня.
Для сопряжения операторской станции с промышленным контроллером на первой устанавливается специальное ПО, называемое драйвером ввода/вывода. Драйвер ввода/вывода поддерживает совместимый с контроллером коммуникационный протокол и позволяет прикладным программам считывать с контроллера параметры или наоборот записывать в него. Пакет визуализации обращается к драйверу ввода/вывода каждый раз, когда требуется обновление отображаемой информации или запись измененных оператором данных. Для взаимодействия пакета визуализации и драйвера ввода/вывода используется несколько протоколов, наиболее популярные из которых OPC (OLE for Process Control) и NetDDE (Network Dynamic Data Exchange). Обобщенно можно сказать, что OPC и NetDDE – это протоколы информационного обмена между различными приложениями, которые могут выполняться как на одном, так и на разных компьютерах. На рисунках 4 и 5 изображено, как взаимодействуют программные компоненты при различных схемах построения операторского уровня.
Рис. 4. Схема взаимодействия программных модулей при использовании одиночных станций.
Рис. 5. Схема взаимодействия программных модулей при использовании клиент-серверной архитектуры.
Как выглядит SCADA?
Разберем простой пример. На рисунке 6 приведена абстрактная схема технологического процесса, хотя полноценным процессом это назвать трудно.
Рис. 6. Пример операторской мнемосхемы.
На рисунке 6 изображен очень упрощенный вариант операторской мнемосхемы для управления тех. процессом. Как видно, резервуар (емкость) наполняется водой. Задача системы - нагреть эту воду до определенной температуры. Для нагрева воды используется газовая горелка. Интенсивность горения регулируется клапаном подачи газа. Также должен быть насос для закачки воды в резервуар и клапан для спуска воды.
На мнемосхеме отображаются основные технологические параметры, такие как: температура воды; уровень воды в резервуаре; работа насосов; состояние клапанов и т.д. Эти данные обновляются на экране с заданной частотой. Если какой-либо параметр достигает аварийного значения, соответствующее поле начинает мигать, привлекая внимание оператора.
Сигналы ввода/вывода и исполнительные механизмы отображаются на мнемосхемах в виде интерактивных графических символов (иконок). Каждому типу сигналов и исполнительных механизмов присваивается свой символ: для дискретного сигнала это может быть переключатель, кнопка или лампочка; для аналогового – ползунок, диаграмма или текстовое поле; для двигателей и насосов – более сложные фейсплейты ( faceplates). Каждый символ, как правило, представляет собой отдельный ActiveX компонент. Вообще технология ActiveX широко используется в SCADA-пакетах, так как позволяет разработчику подгружать дополнительные символы, не входящие в стандартную библиотеку, а также разрабатывать свои собственные графические элементы, используя высокоуровневые языки программирования.
Допустим, оператор хочет включить насос. Для этого он щелкает по его иконке и вызывает панель управления ( faceplate). На этой панели он может выполнить определенные манипуляции: включить или выключить насос, подтвердить аварийную сигнализацию, перевести его в режим “техобслуживания” и т.д. (см. рисунок 7).
Рис. 7. Пример фейсплейта для управления насосом.Оператор также может посмотреть график изменения интересующего его технологического параметра, например, за прошедшую неделю. Для этого ему надо вызвать тренд ( trend) и выбрать соответствующий параметр для отображения. Пример тренда реального времени показан на рисунке 8.
Рис. 8. Пример отображения двух параметров на тренде реального времени.
Для более детального обзора сообщений и аварийных сигнализаций оператор может воспользоваться специальной панелью ( alarm panel), пример которой изображен на рисунке 9. Это отсортированный список сигнализаций (alarms), представленный в удобной для восприятия форме. Оператор может подтвердить ту или иную аварийную сигнализацию, применить фильтр или просто ее скрыть.
Рис. 9. Панель сообщений и аварийных сигнализаций.
Говоря о SCADA, инженеры часто оперируют таким важным понятием как “тэг” ( tag). Тэг является по существу некой переменной программы визуализации и может быть использован как для локального хранения данных внутри программы, так и в качестве ссылки на внешний параметр процесса. Тэги могут быть разных типов, начиная от обычных числовых данных и кончая структурой с множеством полей. Например, один визуализируемый параметр ввода/вывода – это тэг, или функциональный блок PID-регулятора, выполняемый внутри контроллера, - это тоже тэг. Ниже представлена сильно упрощенная структура тэга, соответствующего простому PID-регулятору:
Tag Name = “MyPID”;
Tag Type = PID;
Fields (список параметров):
MyPID.OP
MyPID.SP
MyPID.PV
MyPID.PR
MyPID.TI
MyPID.DI
MyPID.Mode
MyPID.RemoteSP
MyPID.Alarms и т.д.
В комплексной прикладной программе может быть несколько тысяч тэгов. Производители SCADA-пакетов это знают и поэтому применяют политику лицензирования на основе количества используемых тэгов. Каждая купленная лицензия жестко ограничивает суммарное количество тэгов, которые можно использовать в программе. Очевидно, чем больше тегов поддерживает лицензия, тем дороже она стоит; так, например, лицензия на 60 000 тэгов может обойтись в 5000 тыс. долларов или даже дороже. В дополнение к этому многие производители SCADA формируют весьма существенную разницу в цене между “голой” средой исполнения и полноценной средой разработки; естественно, последняя с таким же количеством тэгов будет стоить заметно дороже.
Сегодня на рынке представлено большое количество различных SCADA-пакетов, наиболее популярные из которых представлены ниже:
1. Wonderware Intouch;
2. Simatic WinCC;
3. Iconics Genesis32;
4. Citect;
5. Adastra Trace Mode
Лидирующие позиции занимают Wonderware Intouch (производства Invensys) и Simatic WinCC (разработки Siemens) с суммарным количеством инсталляций более 80 тыс. в мире. Пакет визуализации технологического процесса может поставляться как в составе комплексной системы управления, так и в виде отдельного программного продукта. В последнем случае SCADA комплектуется набором драйверов ввода/вывода для коммуникации с контроллерами различных производителей. [ http://kazanets.narod.ru/HMI_PART1.htm]Тематики
- автоматизация, основные понятия
- автоматизированные системы
Синонимы
EN
Англо-русский словарь нормативно-технической терминологии > human interface
17 human-computer interface
интерфейс человек-машина
—
[Л.Г.Суменко. Англо-русский словарь по информационным технологиям. М.: ГП ЦНИИС, 2003.]Тематики
EN
пользовательский интерфейс
—
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
человеко-машинный интерфейс (ЧМИ)
Технические средства, предназначенные для обеспечения непосредственного взаимодействия между оператором и оборудованием и дающие возможность оператору управлять оборудованием и контролировать его функционирование.
Примечание
Такие средства могут включать приводимые в действие вручную органы управления, контрольные устройства, дисплеи.
[ ГОСТ Р МЭК 60447-2000]
человекомашинный интерфейс (ЧМИ)
Технические средства контроля и управления, являющиеся частью оборудования, предназначенные для обеспечения непосредственного взаимодействия между оператором и оборудованием и дающие возможность оператору управлять оборудованием и контролировать его функционирование (ГОСТ Р МЭК 60447).
Примечание
Такие средства могут включать приводимые в действие вручную органы управления, контрольные устройства и дисплеи.
[ ГОСТ Р МЭК 60073-2000]
человеко-машинный интерфейс
Средства обеспечения двусторонней связи "оператор - технологическое оборудование" (АСУ ТП). Название класса средств, в который входят подклассы:
SCADA (Supervisory Control and Data Acquisition) - Операторское управление и сбор данных от технологического оборудования.
DCS (Distributed Control Systems) - Распределенная система управления технологическим оборудованием.
[ http://www.morepc.ru/dict/]Параллельные тексты EN-RU
MotorSys™ iPMCC solutions can integrate a dedicated human-machine interface (HMI) or communicate via a personal computer directly on the motor starters.
[Schneider Electric]Интеллектуальный центр распределения электроэнергии и управления электродвигателями MotorSys™ может иметь в своем составе специальный человеко-машинный интерфейс (ЧМИ). В качестве альтернативы используется обмен данным между персональным компьютером и пускателями.
[Перевод Интент]
HMI на базе операторских станций
Самое, пожалуй, главное в системе управления - это организация взаимодействия между человеком и программно-аппаратным комплексом. Обеспечение такого взаимодействия и есть задача человеко-машинного интерфейса (HMI, human machine interface).
На мой взгляд, в аббревиатуре “АСУ ТП” ключевым является слово “автоматизированная”, что подразумевает непосредственное участие человека в процессе реализации системой определенных задач. Очевидно, что чем лучше организован HMI, тем эффективнее человек сможет решать поставленные задачи.
Как же организован HMI в современных АСУ ТП?
Существует, как минимум, два подхода реализации функционала HMI:- На базе специализированных рабочих станций оператора, устанавливаемых в центральной диспетчерской;
- На базе панелей локального управления, устанавливаемых непосредственно в цеху по близости с контролируемым технологическим объектам.
Иногда эти два варианта комбинируют, чтобы достичь наибольшей гибкости управления. В данной статье речь пойдет о первом варианте организации операторского уровня.
Аппаратно рабочая станция оператора (OS, operator station) представляет собой ни что иное как персональный компьютер. Как правило, станция снабжается несколькими широкоэкранными мониторами, функциональной клавиатурой и необходимыми сетевыми адаптерами для подключения к сетям верхнего уровня (например, на базе Industrial Ethernet). Станция оператора несколько отличается от привычных для нас офисных компьютеров, прежде всего, своим исполнением и эксплуатационными характеристиками (а также ценой 4000 - 10 000 долларов).
На рисунке 1 изображена рабочая станция оператора системы SIMATIC PCS7 производства Siemens, обладающая следующими техническими характеристиками:
Процессор: Intel Pentium 4, 3.4 ГГц;
Память: DDR2 SDRAM до 4 ГБ;
Материнская плата: ChipSet Intel 945G;
Жесткий диск: SATA-RAID 1/2 x 120 ГБ;
Слоты: 4 x PCI, 2 x PCI E x 1, 1 x PCI E x 16;
Степень защиты: IP 31;
Температура при эксплуатации: 5 – 45 C;
Влажность: 5 – 95 % (без образования конденсата);
Операционная система: Windows XP Professional/2003 Server.
Рис. 1. Пример промышленной рабочей станции оператора.Системный блок может быть как настольного исполнения ( desktop), так и для монтажа в 19” стойку ( rack-mounted). Чаще применяется второй вариант: системный блок монтируется в запираемую стойку для лучшей защищенности и предотвращения несанкционированного доступа.
Какое программное обеспечение используется?
На станции оператора устанавливается программный пакет визуализации технологического процесса (часто называемый SCADA). Большинство пакетов визуализации работают под управлением операционных систем семейства Windows (Windows NT 4.0, Windows 2000/XP, Windows 2003 Server), что, на мой взгляд, является большим минусом.
Программное обеспечение визуализации призвано выполнять следующие задачи:- Отображение технологической информации в удобной для человека графической форме (как правило, в виде интерактивных мнемосхем) – Process Visualization;
- Отображение аварийных сигнализаций технологического процесса – Alarm Visualization;
- Архивирование технологических данных (сбор истории процесса) – Historical Archiving;
- Предоставление оператору возможности манипулировать (управлять) объектами управления – Operator Control.
- Контроль доступа и протоколирование действий оператора – Access Control and Operator’s Actions Archiving.
- Автоматизированное составление отчетов за произвольный интервал времени (посменные отчеты, еженедельные, ежемесячные и т.д.) – Automated Reporting.
Как правило, SCADA состоит из двух частей:
- Среды разработки, где инженер рисует и программирует технологические мнемосхемы;
- Среды исполнения, необходимой для выполнения сконфигурированных мнемосхем в режиме runtime. Фактически это режим повседневной эксплуатации.
Существует две схемы подключения операторских станций к системе управления, а точнее уровню управления. В рамках первой схемы каждая операторская станция подключается к контроллерам уровня управления напрямую или с помощью промежуточного коммутатора (см. рисунок 2). Подключенная таким образом операторская станция работает независимо от других станций сети, и поэтому часто называется одиночной (пусть Вас не смущает такое название, на самом деле таких станций в сети может быть несколько).
Рис. 2. Схема подключения одиночных операторских станций к уровню управления.Есть и другой вариант. Часто операторские станции подключают к серверу или резервированной паре серверов, а серверы в свою очередь подключаются к промышленным контроллерам. Таким образом, сервер, являясь неким буфером, постоянно считывает данные с контроллера и предоставляет их по запросу рабочим станциям. Станции, подключенные по такой схеме, часто называют клиентами (см. рисунок 3).
Как происходит информационный обмен?
Рис. 3. Клиент-серверная архитектура операторского уровня.
Для сопряжения операторской станции с промышленным контроллером на первой устанавливается специальное ПО, называемое драйвером ввода/вывода. Драйвер ввода/вывода поддерживает совместимый с контроллером коммуникационный протокол и позволяет прикладным программам считывать с контроллера параметры или наоборот записывать в него. Пакет визуализации обращается к драйверу ввода/вывода каждый раз, когда требуется обновление отображаемой информации или запись измененных оператором данных. Для взаимодействия пакета визуализации и драйвера ввода/вывода используется несколько протоколов, наиболее популярные из которых OPC (OLE for Process Control) и NetDDE (Network Dynamic Data Exchange). Обобщенно можно сказать, что OPC и NetDDE – это протоколы информационного обмена между различными приложениями, которые могут выполняться как на одном, так и на разных компьютерах. На рисунках 4 и 5 изображено, как взаимодействуют программные компоненты при различных схемах построения операторского уровня.
Рис. 4. Схема взаимодействия программных модулей при использовании одиночных станций.
Рис. 5. Схема взаимодействия программных модулей при использовании клиент-серверной архитектуры.
Как выглядит SCADA?
Разберем простой пример. На рисунке 6 приведена абстрактная схема технологического процесса, хотя полноценным процессом это назвать трудно.
Рис. 6. Пример операторской мнемосхемы.
На рисунке 6 изображен очень упрощенный вариант операторской мнемосхемы для управления тех. процессом. Как видно, резервуар (емкость) наполняется водой. Задача системы - нагреть эту воду до определенной температуры. Для нагрева воды используется газовая горелка. Интенсивность горения регулируется клапаном подачи газа. Также должен быть насос для закачки воды в резервуар и клапан для спуска воды.
На мнемосхеме отображаются основные технологические параметры, такие как: температура воды; уровень воды в резервуаре; работа насосов; состояние клапанов и т.д. Эти данные обновляются на экране с заданной частотой. Если какой-либо параметр достигает аварийного значения, соответствующее поле начинает мигать, привлекая внимание оператора.
Сигналы ввода/вывода и исполнительные механизмы отображаются на мнемосхемах в виде интерактивных графических символов (иконок). Каждому типу сигналов и исполнительных механизмов присваивается свой символ: для дискретного сигнала это может быть переключатель, кнопка или лампочка; для аналогового – ползунок, диаграмма или текстовое поле; для двигателей и насосов – более сложные фейсплейты ( faceplates). Каждый символ, как правило, представляет собой отдельный ActiveX компонент. Вообще технология ActiveX широко используется в SCADA-пакетах, так как позволяет разработчику подгружать дополнительные символы, не входящие в стандартную библиотеку, а также разрабатывать свои собственные графические элементы, используя высокоуровневые языки программирования.
Допустим, оператор хочет включить насос. Для этого он щелкает по его иконке и вызывает панель управления ( faceplate). На этой панели он может выполнить определенные манипуляции: включить или выключить насос, подтвердить аварийную сигнализацию, перевести его в режим “техобслуживания” и т.д. (см. рисунок 7).
Рис. 7. Пример фейсплейта для управления насосом.Оператор также может посмотреть график изменения интересующего его технологического параметра, например, за прошедшую неделю. Для этого ему надо вызвать тренд ( trend) и выбрать соответствующий параметр для отображения. Пример тренда реального времени показан на рисунке 8.
Рис. 8. Пример отображения двух параметров на тренде реального времени.
Для более детального обзора сообщений и аварийных сигнализаций оператор может воспользоваться специальной панелью ( alarm panel), пример которой изображен на рисунке 9. Это отсортированный список сигнализаций (alarms), представленный в удобной для восприятия форме. Оператор может подтвердить ту или иную аварийную сигнализацию, применить фильтр или просто ее скрыть.
Рис. 9. Панель сообщений и аварийных сигнализаций.
Говоря о SCADA, инженеры часто оперируют таким важным понятием как “тэг” ( tag). Тэг является по существу некой переменной программы визуализации и может быть использован как для локального хранения данных внутри программы, так и в качестве ссылки на внешний параметр процесса. Тэги могут быть разных типов, начиная от обычных числовых данных и кончая структурой с множеством полей. Например, один визуализируемый параметр ввода/вывода – это тэг, или функциональный блок PID-регулятора, выполняемый внутри контроллера, - это тоже тэг. Ниже представлена сильно упрощенная структура тэга, соответствующего простому PID-регулятору:
Tag Name = “MyPID”;
Tag Type = PID;
Fields (список параметров):
MyPID.OP
MyPID.SP
MyPID.PV
MyPID.PR
MyPID.TI
MyPID.DI
MyPID.Mode
MyPID.RemoteSP
MyPID.Alarms и т.д.
В комплексной прикладной программе может быть несколько тысяч тэгов. Производители SCADA-пакетов это знают и поэтому применяют политику лицензирования на основе количества используемых тэгов. Каждая купленная лицензия жестко ограничивает суммарное количество тэгов, которые можно использовать в программе. Очевидно, чем больше тегов поддерживает лицензия, тем дороже она стоит; так, например, лицензия на 60 000 тэгов может обойтись в 5000 тыс. долларов или даже дороже. В дополнение к этому многие производители SCADA формируют весьма существенную разницу в цене между “голой” средой исполнения и полноценной средой разработки; естественно, последняя с таким же количеством тэгов будет стоить заметно дороже.
Сегодня на рынке представлено большое количество различных SCADA-пакетов, наиболее популярные из которых представлены ниже:
1. Wonderware Intouch;
2. Simatic WinCC;
3. Iconics Genesis32;
4. Citect;
5. Adastra Trace Mode
Лидирующие позиции занимают Wonderware Intouch (производства Invensys) и Simatic WinCC (разработки Siemens) с суммарным количеством инсталляций более 80 тыс. в мире. Пакет визуализации технологического процесса может поставляться как в составе комплексной системы управления, так и в виде отдельного программного продукта. В последнем случае SCADA комплектуется набором драйверов ввода/вывода для коммуникации с контроллерами различных производителей. [ http://kazanets.narod.ru/HMI_PART1.htm]Тематики
- автоматизация, основные понятия
- автоматизированные системы
Синонимы
EN
Англо-русский словарь нормативно-технической терминологии > human-computer interface
18 Chi
Хи
22-я буква греческого алфавита.
[http://www.rfcmd.ru/glossword/1.8/index.php?a=index&d=23]Тематики
EN
человеко-машинный интерфейс (ЧМИ)
Технические средства, предназначенные для обеспечения непосредственного взаимодействия между оператором и оборудованием и дающие возможность оператору управлять оборудованием и контролировать его функционирование.
Примечание
Такие средства могут включать приводимые в действие вручную органы управления, контрольные устройства, дисплеи.
[ ГОСТ Р МЭК 60447-2000]
человекомашинный интерфейс (ЧМИ)
Технические средства контроля и управления, являющиеся частью оборудования, предназначенные для обеспечения непосредственного взаимодействия между оператором и оборудованием и дающие возможность оператору управлять оборудованием и контролировать его функционирование (ГОСТ Р МЭК 60447).
Примечание
Такие средства могут включать приводимые в действие вручную органы управления, контрольные устройства и дисплеи.
[ ГОСТ Р МЭК 60073-2000]
человеко-машинный интерфейс
Средства обеспечения двусторонней связи "оператор - технологическое оборудование" (АСУ ТП). Название класса средств, в который входят подклассы:
SCADA (Supervisory Control and Data Acquisition) - Операторское управление и сбор данных от технологического оборудования.
DCS (Distributed Control Systems) - Распределенная система управления технологическим оборудованием.
[ http://www.morepc.ru/dict/]Параллельные тексты EN-RU
MotorSys™ iPMCC solutions can integrate a dedicated human-machine interface (HMI) or communicate via a personal computer directly on the motor starters.
[Schneider Electric]Интеллектуальный центр распределения электроэнергии и управления электродвигателями MotorSys™ может иметь в своем составе специальный человеко-машинный интерфейс (ЧМИ). В качестве альтернативы используется обмен данным между персональным компьютером и пускателями.
[Перевод Интент]
HMI на базе операторских станций
Самое, пожалуй, главное в системе управления - это организация взаимодействия между человеком и программно-аппаратным комплексом. Обеспечение такого взаимодействия и есть задача человеко-машинного интерфейса (HMI, human machine interface).
На мой взгляд, в аббревиатуре “АСУ ТП” ключевым является слово “автоматизированная”, что подразумевает непосредственное участие человека в процессе реализации системой определенных задач. Очевидно, что чем лучше организован HMI, тем эффективнее человек сможет решать поставленные задачи.
Как же организован HMI в современных АСУ ТП?
Существует, как минимум, два подхода реализации функционала HMI:- На базе специализированных рабочих станций оператора, устанавливаемых в центральной диспетчерской;
- На базе панелей локального управления, устанавливаемых непосредственно в цеху по близости с контролируемым технологическим объектам.
Иногда эти два варианта комбинируют, чтобы достичь наибольшей гибкости управления. В данной статье речь пойдет о первом варианте организации операторского уровня.
Аппаратно рабочая станция оператора (OS, operator station) представляет собой ни что иное как персональный компьютер. Как правило, станция снабжается несколькими широкоэкранными мониторами, функциональной клавиатурой и необходимыми сетевыми адаптерами для подключения к сетям верхнего уровня (например, на базе Industrial Ethernet). Станция оператора несколько отличается от привычных для нас офисных компьютеров, прежде всего, своим исполнением и эксплуатационными характеристиками (а также ценой 4000 - 10 000 долларов).
На рисунке 1 изображена рабочая станция оператора системы SIMATIC PCS7 производства Siemens, обладающая следующими техническими характеристиками:
Процессор: Intel Pentium 4, 3.4 ГГц;
Память: DDR2 SDRAM до 4 ГБ;
Материнская плата: ChipSet Intel 945G;
Жесткий диск: SATA-RAID 1/2 x 120 ГБ;
Слоты: 4 x PCI, 2 x PCI E x 1, 1 x PCI E x 16;
Степень защиты: IP 31;
Температура при эксплуатации: 5 – 45 C;
Влажность: 5 – 95 % (без образования конденсата);
Операционная система: Windows XP Professional/2003 Server.
Рис. 1. Пример промышленной рабочей станции оператора.Системный блок может быть как настольного исполнения ( desktop), так и для монтажа в 19” стойку ( rack-mounted). Чаще применяется второй вариант: системный блок монтируется в запираемую стойку для лучшей защищенности и предотвращения несанкционированного доступа.
Какое программное обеспечение используется?
На станции оператора устанавливается программный пакет визуализации технологического процесса (часто называемый SCADA). Большинство пакетов визуализации работают под управлением операционных систем семейства Windows (Windows NT 4.0, Windows 2000/XP, Windows 2003 Server), что, на мой взгляд, является большим минусом.
Программное обеспечение визуализации призвано выполнять следующие задачи:- Отображение технологической информации в удобной для человека графической форме (как правило, в виде интерактивных мнемосхем) – Process Visualization;
- Отображение аварийных сигнализаций технологического процесса – Alarm Visualization;
- Архивирование технологических данных (сбор истории процесса) – Historical Archiving;
- Предоставление оператору возможности манипулировать (управлять) объектами управления – Operator Control.
- Контроль доступа и протоколирование действий оператора – Access Control and Operator’s Actions Archiving.
- Автоматизированное составление отчетов за произвольный интервал времени (посменные отчеты, еженедельные, ежемесячные и т.д.) – Automated Reporting.
Как правило, SCADA состоит из двух частей:
- Среды разработки, где инженер рисует и программирует технологические мнемосхемы;
- Среды исполнения, необходимой для выполнения сконфигурированных мнемосхем в режиме runtime. Фактически это режим повседневной эксплуатации.
Существует две схемы подключения операторских станций к системе управления, а точнее уровню управления. В рамках первой схемы каждая операторская станция подключается к контроллерам уровня управления напрямую или с помощью промежуточного коммутатора (см. рисунок 2). Подключенная таким образом операторская станция работает независимо от других станций сети, и поэтому часто называется одиночной (пусть Вас не смущает такое название, на самом деле таких станций в сети может быть несколько).
Рис. 2. Схема подключения одиночных операторских станций к уровню управления.Есть и другой вариант. Часто операторские станции подключают к серверу или резервированной паре серверов, а серверы в свою очередь подключаются к промышленным контроллерам. Таким образом, сервер, являясь неким буфером, постоянно считывает данные с контроллера и предоставляет их по запросу рабочим станциям. Станции, подключенные по такой схеме, часто называют клиентами (см. рисунок 3).
Как происходит информационный обмен?
Рис. 3. Клиент-серверная архитектура операторского уровня.
Для сопряжения операторской станции с промышленным контроллером на первой устанавливается специальное ПО, называемое драйвером ввода/вывода. Драйвер ввода/вывода поддерживает совместимый с контроллером коммуникационный протокол и позволяет прикладным программам считывать с контроллера параметры или наоборот записывать в него. Пакет визуализации обращается к драйверу ввода/вывода каждый раз, когда требуется обновление отображаемой информации или запись измененных оператором данных. Для взаимодействия пакета визуализации и драйвера ввода/вывода используется несколько протоколов, наиболее популярные из которых OPC (OLE for Process Control) и NetDDE (Network Dynamic Data Exchange). Обобщенно можно сказать, что OPC и NetDDE – это протоколы информационного обмена между различными приложениями, которые могут выполняться как на одном, так и на разных компьютерах. На рисунках 4 и 5 изображено, как взаимодействуют программные компоненты при различных схемах построения операторского уровня.
Рис. 4. Схема взаимодействия программных модулей при использовании одиночных станций.
Рис. 5. Схема взаимодействия программных модулей при использовании клиент-серверной архитектуры.
Как выглядит SCADA?
Разберем простой пример. На рисунке 6 приведена абстрактная схема технологического процесса, хотя полноценным процессом это назвать трудно.
Рис. 6. Пример операторской мнемосхемы.
На рисунке 6 изображен очень упрощенный вариант операторской мнемосхемы для управления тех. процессом. Как видно, резервуар (емкость) наполняется водой. Задача системы - нагреть эту воду до определенной температуры. Для нагрева воды используется газовая горелка. Интенсивность горения регулируется клапаном подачи газа. Также должен быть насос для закачки воды в резервуар и клапан для спуска воды.
На мнемосхеме отображаются основные технологические параметры, такие как: температура воды; уровень воды в резервуаре; работа насосов; состояние клапанов и т.д. Эти данные обновляются на экране с заданной частотой. Если какой-либо параметр достигает аварийного значения, соответствующее поле начинает мигать, привлекая внимание оператора.
Сигналы ввода/вывода и исполнительные механизмы отображаются на мнемосхемах в виде интерактивных графических символов (иконок). Каждому типу сигналов и исполнительных механизмов присваивается свой символ: для дискретного сигнала это может быть переключатель, кнопка или лампочка; для аналогового – ползунок, диаграмма или текстовое поле; для двигателей и насосов – более сложные фейсплейты ( faceplates). Каждый символ, как правило, представляет собой отдельный ActiveX компонент. Вообще технология ActiveX широко используется в SCADA-пакетах, так как позволяет разработчику подгружать дополнительные символы, не входящие в стандартную библиотеку, а также разрабатывать свои собственные графические элементы, используя высокоуровневые языки программирования.
Допустим, оператор хочет включить насос. Для этого он щелкает по его иконке и вызывает панель управления ( faceplate). На этой панели он может выполнить определенные манипуляции: включить или выключить насос, подтвердить аварийную сигнализацию, перевести его в режим “техобслуживания” и т.д. (см. рисунок 7).
Рис. 7. Пример фейсплейта для управления насосом.Оператор также может посмотреть график изменения интересующего его технологического параметра, например, за прошедшую неделю. Для этого ему надо вызвать тренд ( trend) и выбрать соответствующий параметр для отображения. Пример тренда реального времени показан на рисунке 8.
Рис. 8. Пример отображения двух параметров на тренде реального времени.
Для более детального обзора сообщений и аварийных сигнализаций оператор может воспользоваться специальной панелью ( alarm panel), пример которой изображен на рисунке 9. Это отсортированный список сигнализаций (alarms), представленный в удобной для восприятия форме. Оператор может подтвердить ту или иную аварийную сигнализацию, применить фильтр или просто ее скрыть.
Рис. 9. Панель сообщений и аварийных сигнализаций.
Говоря о SCADA, инженеры часто оперируют таким важным понятием как “тэг” ( tag). Тэг является по существу некой переменной программы визуализации и может быть использован как для локального хранения данных внутри программы, так и в качестве ссылки на внешний параметр процесса. Тэги могут быть разных типов, начиная от обычных числовых данных и кончая структурой с множеством полей. Например, один визуализируемый параметр ввода/вывода – это тэг, или функциональный блок PID-регулятора, выполняемый внутри контроллера, - это тоже тэг. Ниже представлена сильно упрощенная структура тэга, соответствующего простому PID-регулятору:
Tag Name = “MyPID”;
Tag Type = PID;
Fields (список параметров):
MyPID.OP
MyPID.SP
MyPID.PV
MyPID.PR
MyPID.TI
MyPID.DI
MyPID.Mode
MyPID.RemoteSP
MyPID.Alarms и т.д.
В комплексной прикладной программе может быть несколько тысяч тэгов. Производители SCADA-пакетов это знают и поэтому применяют политику лицензирования на основе количества используемых тэгов. Каждая купленная лицензия жестко ограничивает суммарное количество тэгов, которые можно использовать в программе. Очевидно, чем больше тегов поддерживает лицензия, тем дороже она стоит; так, например, лицензия на 60 000 тэгов может обойтись в 5000 тыс. долларов или даже дороже. В дополнение к этому многие производители SCADA формируют весьма существенную разницу в цене между “голой” средой исполнения и полноценной средой разработки; естественно, последняя с таким же количеством тэгов будет стоить заметно дороже.
Сегодня на рынке представлено большое количество различных SCADA-пакетов, наиболее популярные из которых представлены ниже:
1. Wonderware Intouch;
2. Simatic WinCC;
3. Iconics Genesis32;
4. Citect;
5. Adastra Trace Mode
Лидирующие позиции занимают Wonderware Intouch (производства Invensys) и Simatic WinCC (разработки Siemens) с суммарным количеством инсталляций более 80 тыс. в мире. Пакет визуализации технологического процесса может поставляться как в составе комплексной системы управления, так и в виде отдельного программного продукта. В последнем случае SCADA комплектуется набором драйверов ввода/вывода для коммуникации с контроллерами различных производителей. [ http://kazanets.narod.ru/HMI_PART1.htm]Тематики
- автоматизация, основные понятия
- автоматизированные системы
Синонимы
EN
Англо-русский словарь нормативно-технической терминологии > Chi
19 computer human interface
человеко-машинный интерфейс (ЧМИ)
Технические средства, предназначенные для обеспечения непосредственного взаимодействия между оператором и оборудованием и дающие возможность оператору управлять оборудованием и контролировать его функционирование.
Примечание
Такие средства могут включать приводимые в действие вручную органы управления, контрольные устройства, дисплеи.
[ ГОСТ Р МЭК 60447-2000]
человекомашинный интерфейс (ЧМИ)
Технические средства контроля и управления, являющиеся частью оборудования, предназначенные для обеспечения непосредственного взаимодействия между оператором и оборудованием и дающие возможность оператору управлять оборудованием и контролировать его функционирование (ГОСТ Р МЭК 60447).
Примечание
Такие средства могут включать приводимые в действие вручную органы управления, контрольные устройства и дисплеи.
[ ГОСТ Р МЭК 60073-2000]
человеко-машинный интерфейс
Средства обеспечения двусторонней связи "оператор - технологическое оборудование" (АСУ ТП). Название класса средств, в который входят подклассы:
SCADA (Supervisory Control and Data Acquisition) - Операторское управление и сбор данных от технологического оборудования.
DCS (Distributed Control Systems) - Распределенная система управления технологическим оборудованием.
[ http://www.morepc.ru/dict/]Параллельные тексты EN-RU
MotorSys™ iPMCC solutions can integrate a dedicated human-machine interface (HMI) or communicate via a personal computer directly on the motor starters.
[Schneider Electric]Интеллектуальный центр распределения электроэнергии и управления электродвигателями MotorSys™ может иметь в своем составе специальный человеко-машинный интерфейс (ЧМИ). В качестве альтернативы используется обмен данным между персональным компьютером и пускателями.
[Перевод Интент]
HMI на базе операторских станций
Самое, пожалуй, главное в системе управления - это организация взаимодействия между человеком и программно-аппаратным комплексом. Обеспечение такого взаимодействия и есть задача человеко-машинного интерфейса (HMI, human machine interface).
На мой взгляд, в аббревиатуре “АСУ ТП” ключевым является слово “автоматизированная”, что подразумевает непосредственное участие человека в процессе реализации системой определенных задач. Очевидно, что чем лучше организован HMI, тем эффективнее человек сможет решать поставленные задачи.
Как же организован HMI в современных АСУ ТП?
Существует, как минимум, два подхода реализации функционала HMI:- На базе специализированных рабочих станций оператора, устанавливаемых в центральной диспетчерской;
- На базе панелей локального управления, устанавливаемых непосредственно в цеху по близости с контролируемым технологическим объектам.
Иногда эти два варианта комбинируют, чтобы достичь наибольшей гибкости управления. В данной статье речь пойдет о первом варианте организации операторского уровня.
Аппаратно рабочая станция оператора (OS, operator station) представляет собой ни что иное как персональный компьютер. Как правило, станция снабжается несколькими широкоэкранными мониторами, функциональной клавиатурой и необходимыми сетевыми адаптерами для подключения к сетям верхнего уровня (например, на базе Industrial Ethernet). Станция оператора несколько отличается от привычных для нас офисных компьютеров, прежде всего, своим исполнением и эксплуатационными характеристиками (а также ценой 4000 - 10 000 долларов).
На рисунке 1 изображена рабочая станция оператора системы SIMATIC PCS7 производства Siemens, обладающая следующими техническими характеристиками:
Процессор: Intel Pentium 4, 3.4 ГГц;
Память: DDR2 SDRAM до 4 ГБ;
Материнская плата: ChipSet Intel 945G;
Жесткий диск: SATA-RAID 1/2 x 120 ГБ;
Слоты: 4 x PCI, 2 x PCI E x 1, 1 x PCI E x 16;
Степень защиты: IP 31;
Температура при эксплуатации: 5 – 45 C;
Влажность: 5 – 95 % (без образования конденсата);
Операционная система: Windows XP Professional/2003 Server.
Рис. 1. Пример промышленной рабочей станции оператора.Системный блок может быть как настольного исполнения ( desktop), так и для монтажа в 19” стойку ( rack-mounted). Чаще применяется второй вариант: системный блок монтируется в запираемую стойку для лучшей защищенности и предотвращения несанкционированного доступа.
Какое программное обеспечение используется?
На станции оператора устанавливается программный пакет визуализации технологического процесса (часто называемый SCADA). Большинство пакетов визуализации работают под управлением операционных систем семейства Windows (Windows NT 4.0, Windows 2000/XP, Windows 2003 Server), что, на мой взгляд, является большим минусом.
Программное обеспечение визуализации призвано выполнять следующие задачи:- Отображение технологической информации в удобной для человека графической форме (как правило, в виде интерактивных мнемосхем) – Process Visualization;
- Отображение аварийных сигнализаций технологического процесса – Alarm Visualization;
- Архивирование технологических данных (сбор истории процесса) – Historical Archiving;
- Предоставление оператору возможности манипулировать (управлять) объектами управления – Operator Control.
- Контроль доступа и протоколирование действий оператора – Access Control and Operator’s Actions Archiving.
- Автоматизированное составление отчетов за произвольный интервал времени (посменные отчеты, еженедельные, ежемесячные и т.д.) – Automated Reporting.
Как правило, SCADA состоит из двух частей:
- Среды разработки, где инженер рисует и программирует технологические мнемосхемы;
- Среды исполнения, необходимой для выполнения сконфигурированных мнемосхем в режиме runtime. Фактически это режим повседневной эксплуатации.
Существует две схемы подключения операторских станций к системе управления, а точнее уровню управления. В рамках первой схемы каждая операторская станция подключается к контроллерам уровня управления напрямую или с помощью промежуточного коммутатора (см. рисунок 2). Подключенная таким образом операторская станция работает независимо от других станций сети, и поэтому часто называется одиночной (пусть Вас не смущает такое название, на самом деле таких станций в сети может быть несколько).
Рис. 2. Схема подключения одиночных операторских станций к уровню управления.Есть и другой вариант. Часто операторские станции подключают к серверу или резервированной паре серверов, а серверы в свою очередь подключаются к промышленным контроллерам. Таким образом, сервер, являясь неким буфером, постоянно считывает данные с контроллера и предоставляет их по запросу рабочим станциям. Станции, подключенные по такой схеме, часто называют клиентами (см. рисунок 3).
Как происходит информационный обмен?
Рис. 3. Клиент-серверная архитектура операторского уровня.
Для сопряжения операторской станции с промышленным контроллером на первой устанавливается специальное ПО, называемое драйвером ввода/вывода. Драйвер ввода/вывода поддерживает совместимый с контроллером коммуникационный протокол и позволяет прикладным программам считывать с контроллера параметры или наоборот записывать в него. Пакет визуализации обращается к драйверу ввода/вывода каждый раз, когда требуется обновление отображаемой информации или запись измененных оператором данных. Для взаимодействия пакета визуализации и драйвера ввода/вывода используется несколько протоколов, наиболее популярные из которых OPC (OLE for Process Control) и NetDDE (Network Dynamic Data Exchange). Обобщенно можно сказать, что OPC и NetDDE – это протоколы информационного обмена между различными приложениями, которые могут выполняться как на одном, так и на разных компьютерах. На рисунках 4 и 5 изображено, как взаимодействуют программные компоненты при различных схемах построения операторского уровня.
Рис. 4. Схема взаимодействия программных модулей при использовании одиночных станций.
Рис. 5. Схема взаимодействия программных модулей при использовании клиент-серверной архитектуры.
Как выглядит SCADA?
Разберем простой пример. На рисунке 6 приведена абстрактная схема технологического процесса, хотя полноценным процессом это назвать трудно.
Рис. 6. Пример операторской мнемосхемы.
На рисунке 6 изображен очень упрощенный вариант операторской мнемосхемы для управления тех. процессом. Как видно, резервуар (емкость) наполняется водой. Задача системы - нагреть эту воду до определенной температуры. Для нагрева воды используется газовая горелка. Интенсивность горения регулируется клапаном подачи газа. Также должен быть насос для закачки воды в резервуар и клапан для спуска воды.
На мнемосхеме отображаются основные технологические параметры, такие как: температура воды; уровень воды в резервуаре; работа насосов; состояние клапанов и т.д. Эти данные обновляются на экране с заданной частотой. Если какой-либо параметр достигает аварийного значения, соответствующее поле начинает мигать, привлекая внимание оператора.
Сигналы ввода/вывода и исполнительные механизмы отображаются на мнемосхемах в виде интерактивных графических символов (иконок). Каждому типу сигналов и исполнительных механизмов присваивается свой символ: для дискретного сигнала это может быть переключатель, кнопка или лампочка; для аналогового – ползунок, диаграмма или текстовое поле; для двигателей и насосов – более сложные фейсплейты ( faceplates). Каждый символ, как правило, представляет собой отдельный ActiveX компонент. Вообще технология ActiveX широко используется в SCADA-пакетах, так как позволяет разработчику подгружать дополнительные символы, не входящие в стандартную библиотеку, а также разрабатывать свои собственные графические элементы, используя высокоуровневые языки программирования.
Допустим, оператор хочет включить насос. Для этого он щелкает по его иконке и вызывает панель управления ( faceplate). На этой панели он может выполнить определенные манипуляции: включить или выключить насос, подтвердить аварийную сигнализацию, перевести его в режим “техобслуживания” и т.д. (см. рисунок 7).
Рис. 7. Пример фейсплейта для управления насосом.Оператор также может посмотреть график изменения интересующего его технологического параметра, например, за прошедшую неделю. Для этого ему надо вызвать тренд ( trend) и выбрать соответствующий параметр для отображения. Пример тренда реального времени показан на рисунке 8.
Рис. 8. Пример отображения двух параметров на тренде реального времени.
Для более детального обзора сообщений и аварийных сигнализаций оператор может воспользоваться специальной панелью ( alarm panel), пример которой изображен на рисунке 9. Это отсортированный список сигнализаций (alarms), представленный в удобной для восприятия форме. Оператор может подтвердить ту или иную аварийную сигнализацию, применить фильтр или просто ее скрыть.
Рис. 9. Панель сообщений и аварийных сигнализаций.
Говоря о SCADA, инженеры часто оперируют таким важным понятием как “тэг” ( tag). Тэг является по существу некой переменной программы визуализации и может быть использован как для локального хранения данных внутри программы, так и в качестве ссылки на внешний параметр процесса. Тэги могут быть разных типов, начиная от обычных числовых данных и кончая структурой с множеством полей. Например, один визуализируемый параметр ввода/вывода – это тэг, или функциональный блок PID-регулятора, выполняемый внутри контроллера, - это тоже тэг. Ниже представлена сильно упрощенная структура тэга, соответствующего простому PID-регулятору:
Tag Name = “MyPID”;
Tag Type = PID;
Fields (список параметров):
MyPID.OP
MyPID.SP
MyPID.PV
MyPID.PR
MyPID.TI
MyPID.DI
MyPID.Mode
MyPID.RemoteSP
MyPID.Alarms и т.д.
В комплексной прикладной программе может быть несколько тысяч тэгов. Производители SCADA-пакетов это знают и поэтому применяют политику лицензирования на основе количества используемых тэгов. Каждая купленная лицензия жестко ограничивает суммарное количество тэгов, которые можно использовать в программе. Очевидно, чем больше тегов поддерживает лицензия, тем дороже она стоит; так, например, лицензия на 60 000 тэгов может обойтись в 5000 тыс. долларов или даже дороже. В дополнение к этому многие производители SCADA формируют весьма существенную разницу в цене между “голой” средой исполнения и полноценной средой разработки; естественно, последняя с таким же количеством тэгов будет стоить заметно дороже.
Сегодня на рынке представлено большое количество различных SCADA-пакетов, наиболее популярные из которых представлены ниже:
1. Wonderware Intouch;
2. Simatic WinCC;
3. Iconics Genesis32;
4. Citect;
5. Adastra Trace Mode
Лидирующие позиции занимают Wonderware Intouch (производства Invensys) и Simatic WinCC (разработки Siemens) с суммарным количеством инсталляций более 80 тыс. в мире. Пакет визуализации технологического процесса может поставляться как в составе комплексной системы управления, так и в виде отдельного программного продукта. В последнем случае SCADA комплектуется набором драйверов ввода/вывода для коммуникации с контроллерами различных производителей. [ http://kazanets.narod.ru/HMI_PART1.htm]Тематики
- автоматизация, основные понятия
- автоматизированные системы
Синонимы
EN
Англо-русский словарь нормативно-технической терминологии > computer human interface
20 human interface device
человеко-машинный интерфейс (ЧМИ)
Технические средства, предназначенные для обеспечения непосредственного взаимодействия между оператором и оборудованием и дающие возможность оператору управлять оборудованием и контролировать его функционирование.
Примечание
Такие средства могут включать приводимые в действие вручную органы управления, контрольные устройства, дисплеи.
[ ГОСТ Р МЭК 60447-2000]
человекомашинный интерфейс (ЧМИ)
Технические средства контроля и управления, являющиеся частью оборудования, предназначенные для обеспечения непосредственного взаимодействия между оператором и оборудованием и дающие возможность оператору управлять оборудованием и контролировать его функционирование (ГОСТ Р МЭК 60447).
Примечание
Такие средства могут включать приводимые в действие вручную органы управления, контрольные устройства и дисплеи.
[ ГОСТ Р МЭК 60073-2000]
человеко-машинный интерфейс
Средства обеспечения двусторонней связи "оператор - технологическое оборудование" (АСУ ТП). Название класса средств, в который входят подклассы:
SCADA (Supervisory Control and Data Acquisition) - Операторское управление и сбор данных от технологического оборудования.
DCS (Distributed Control Systems) - Распределенная система управления технологическим оборудованием.
[ http://www.morepc.ru/dict/]Параллельные тексты EN-RU
MotorSys™ iPMCC solutions can integrate a dedicated human-machine interface (HMI) or communicate via a personal computer directly on the motor starters.
[Schneider Electric]Интеллектуальный центр распределения электроэнергии и управления электродвигателями MotorSys™ может иметь в своем составе специальный человеко-машинный интерфейс (ЧМИ). В качестве альтернативы используется обмен данным между персональным компьютером и пускателями.
[Перевод Интент]
HMI на базе операторских станций
Самое, пожалуй, главное в системе управления - это организация взаимодействия между человеком и программно-аппаратным комплексом. Обеспечение такого взаимодействия и есть задача человеко-машинного интерфейса (HMI, human machine interface).
На мой взгляд, в аббревиатуре “АСУ ТП” ключевым является слово “автоматизированная”, что подразумевает непосредственное участие человека в процессе реализации системой определенных задач. Очевидно, что чем лучше организован HMI, тем эффективнее человек сможет решать поставленные задачи.
Как же организован HMI в современных АСУ ТП?
Существует, как минимум, два подхода реализации функционала HMI:- На базе специализированных рабочих станций оператора, устанавливаемых в центральной диспетчерской;
- На базе панелей локального управления, устанавливаемых непосредственно в цеху по близости с контролируемым технологическим объектам.
Иногда эти два варианта комбинируют, чтобы достичь наибольшей гибкости управления. В данной статье речь пойдет о первом варианте организации операторского уровня.
Аппаратно рабочая станция оператора (OS, operator station) представляет собой ни что иное как персональный компьютер. Как правило, станция снабжается несколькими широкоэкранными мониторами, функциональной клавиатурой и необходимыми сетевыми адаптерами для подключения к сетям верхнего уровня (например, на базе Industrial Ethernet). Станция оператора несколько отличается от привычных для нас офисных компьютеров, прежде всего, своим исполнением и эксплуатационными характеристиками (а также ценой 4000 - 10 000 долларов).
На рисунке 1 изображена рабочая станция оператора системы SIMATIC PCS7 производства Siemens, обладающая следующими техническими характеристиками:
Процессор: Intel Pentium 4, 3.4 ГГц;
Память: DDR2 SDRAM до 4 ГБ;
Материнская плата: ChipSet Intel 945G;
Жесткий диск: SATA-RAID 1/2 x 120 ГБ;
Слоты: 4 x PCI, 2 x PCI E x 1, 1 x PCI E x 16;
Степень защиты: IP 31;
Температура при эксплуатации: 5 – 45 C;
Влажность: 5 – 95 % (без образования конденсата);
Операционная система: Windows XP Professional/2003 Server.
Рис. 1. Пример промышленной рабочей станции оператора.Системный блок может быть как настольного исполнения ( desktop), так и для монтажа в 19” стойку ( rack-mounted). Чаще применяется второй вариант: системный блок монтируется в запираемую стойку для лучшей защищенности и предотвращения несанкционированного доступа.
Какое программное обеспечение используется?
На станции оператора устанавливается программный пакет визуализации технологического процесса (часто называемый SCADA). Большинство пакетов визуализации работают под управлением операционных систем семейства Windows (Windows NT 4.0, Windows 2000/XP, Windows 2003 Server), что, на мой взгляд, является большим минусом.
Программное обеспечение визуализации призвано выполнять следующие задачи:- Отображение технологической информации в удобной для человека графической форме (как правило, в виде интерактивных мнемосхем) – Process Visualization;
- Отображение аварийных сигнализаций технологического процесса – Alarm Visualization;
- Архивирование технологических данных (сбор истории процесса) – Historical Archiving;
- Предоставление оператору возможности манипулировать (управлять) объектами управления – Operator Control.
- Контроль доступа и протоколирование действий оператора – Access Control and Operator’s Actions Archiving.
- Автоматизированное составление отчетов за произвольный интервал времени (посменные отчеты, еженедельные, ежемесячные и т.д.) – Automated Reporting.
Как правило, SCADA состоит из двух частей:
- Среды разработки, где инженер рисует и программирует технологические мнемосхемы;
- Среды исполнения, необходимой для выполнения сконфигурированных мнемосхем в режиме runtime. Фактически это режим повседневной эксплуатации.
Существует две схемы подключения операторских станций к системе управления, а точнее уровню управления. В рамках первой схемы каждая операторская станция подключается к контроллерам уровня управления напрямую или с помощью промежуточного коммутатора (см. рисунок 2). Подключенная таким образом операторская станция работает независимо от других станций сети, и поэтому часто называется одиночной (пусть Вас не смущает такое название, на самом деле таких станций в сети может быть несколько).
Рис. 2. Схема подключения одиночных операторских станций к уровню управления.Есть и другой вариант. Часто операторские станции подключают к серверу или резервированной паре серверов, а серверы в свою очередь подключаются к промышленным контроллерам. Таким образом, сервер, являясь неким буфером, постоянно считывает данные с контроллера и предоставляет их по запросу рабочим станциям. Станции, подключенные по такой схеме, часто называют клиентами (см. рисунок 3).
Как происходит информационный обмен?
Рис. 3. Клиент-серверная архитектура операторского уровня.
Для сопряжения операторской станции с промышленным контроллером на первой устанавливается специальное ПО, называемое драйвером ввода/вывода. Драйвер ввода/вывода поддерживает совместимый с контроллером коммуникационный протокол и позволяет прикладным программам считывать с контроллера параметры или наоборот записывать в него. Пакет визуализации обращается к драйверу ввода/вывода каждый раз, когда требуется обновление отображаемой информации или запись измененных оператором данных. Для взаимодействия пакета визуализации и драйвера ввода/вывода используется несколько протоколов, наиболее популярные из которых OPC (OLE for Process Control) и NetDDE (Network Dynamic Data Exchange). Обобщенно можно сказать, что OPC и NetDDE – это протоколы информационного обмена между различными приложениями, которые могут выполняться как на одном, так и на разных компьютерах. На рисунках 4 и 5 изображено, как взаимодействуют программные компоненты при различных схемах построения операторского уровня.
Рис. 4. Схема взаимодействия программных модулей при использовании одиночных станций.
Рис. 5. Схема взаимодействия программных модулей при использовании клиент-серверной архитектуры.
Как выглядит SCADA?
Разберем простой пример. На рисунке 6 приведена абстрактная схема технологического процесса, хотя полноценным процессом это назвать трудно.
Рис. 6. Пример операторской мнемосхемы.
На рисунке 6 изображен очень упрощенный вариант операторской мнемосхемы для управления тех. процессом. Как видно, резервуар (емкость) наполняется водой. Задача системы - нагреть эту воду до определенной температуры. Для нагрева воды используется газовая горелка. Интенсивность горения регулируется клапаном подачи газа. Также должен быть насос для закачки воды в резервуар и клапан для спуска воды.
На мнемосхеме отображаются основные технологические параметры, такие как: температура воды; уровень воды в резервуаре; работа насосов; состояние клапанов и т.д. Эти данные обновляются на экране с заданной частотой. Если какой-либо параметр достигает аварийного значения, соответствующее поле начинает мигать, привлекая внимание оператора.
Сигналы ввода/вывода и исполнительные механизмы отображаются на мнемосхемах в виде интерактивных графических символов (иконок). Каждому типу сигналов и исполнительных механизмов присваивается свой символ: для дискретного сигнала это может быть переключатель, кнопка или лампочка; для аналогового – ползунок, диаграмма или текстовое поле; для двигателей и насосов – более сложные фейсплейты ( faceplates). Каждый символ, как правило, представляет собой отдельный ActiveX компонент. Вообще технология ActiveX широко используется в SCADA-пакетах, так как позволяет разработчику подгружать дополнительные символы, не входящие в стандартную библиотеку, а также разрабатывать свои собственные графические элементы, используя высокоуровневые языки программирования.
Допустим, оператор хочет включить насос. Для этого он щелкает по его иконке и вызывает панель управления ( faceplate). На этой панели он может выполнить определенные манипуляции: включить или выключить насос, подтвердить аварийную сигнализацию, перевести его в режим “техобслуживания” и т.д. (см. рисунок 7).
Рис. 7. Пример фейсплейта для управления насосом.Оператор также может посмотреть график изменения интересующего его технологического параметра, например, за прошедшую неделю. Для этого ему надо вызвать тренд ( trend) и выбрать соответствующий параметр для отображения. Пример тренда реального времени показан на рисунке 8.
Рис. 8. Пример отображения двух параметров на тренде реального времени.
Для более детального обзора сообщений и аварийных сигнализаций оператор может воспользоваться специальной панелью ( alarm panel), пример которой изображен на рисунке 9. Это отсортированный список сигнализаций (alarms), представленный в удобной для восприятия форме. Оператор может подтвердить ту или иную аварийную сигнализацию, применить фильтр или просто ее скрыть.
Рис. 9. Панель сообщений и аварийных сигнализаций.
Говоря о SCADA, инженеры часто оперируют таким важным понятием как “тэг” ( tag). Тэг является по существу некой переменной программы визуализации и может быть использован как для локального хранения данных внутри программы, так и в качестве ссылки на внешний параметр процесса. Тэги могут быть разных типов, начиная от обычных числовых данных и кончая структурой с множеством полей. Например, один визуализируемый параметр ввода/вывода – это тэг, или функциональный блок PID-регулятора, выполняемый внутри контроллера, - это тоже тэг. Ниже представлена сильно упрощенная структура тэга, соответствующего простому PID-регулятору:
Tag Name = “MyPID”;
Tag Type = PID;
Fields (список параметров):
MyPID.OP
MyPID.SP
MyPID.PV
MyPID.PR
MyPID.TI
MyPID.DI
MyPID.Mode
MyPID.RemoteSP
MyPID.Alarms и т.д.
В комплексной прикладной программе может быть несколько тысяч тэгов. Производители SCADA-пакетов это знают и поэтому применяют политику лицензирования на основе количества используемых тэгов. Каждая купленная лицензия жестко ограничивает суммарное количество тэгов, которые можно использовать в программе. Очевидно, чем больше тегов поддерживает лицензия, тем дороже она стоит; так, например, лицензия на 60 000 тэгов может обойтись в 5000 тыс. долларов или даже дороже. В дополнение к этому многие производители SCADA формируют весьма существенную разницу в цене между “голой” средой исполнения и полноценной средой разработки; естественно, последняя с таким же количеством тэгов будет стоить заметно дороже.
Сегодня на рынке представлено большое количество различных SCADA-пакетов, наиболее популярные из которых представлены ниже:
1. Wonderware Intouch;
2. Simatic WinCC;
3. Iconics Genesis32;
4. Citect;
5. Adastra Trace Mode
Лидирующие позиции занимают Wonderware Intouch (производства Invensys) и Simatic WinCC (разработки Siemens) с суммарным количеством инсталляций более 80 тыс. в мире. Пакет визуализации технологического процесса может поставляться как в составе комплексной системы управления, так и в виде отдельного программного продукта. В последнем случае SCADA комплектуется набором драйверов ввода/вывода для коммуникации с контроллерами различных производителей. [ http://kazanets.narod.ru/HMI_PART1.htm]Тематики
- автоматизация, основные понятия
- автоматизированные системы
Синонимы
EN
Англо-русский словарь нормативно-технической терминологии > human interface device
СтраницыСм. также в других словарях:
система управления электродвигателем — Параллельные тексты EN RU The TeSys® T Motor Management System offers protection, control, and monitoring capabilities for single phase and 3 phase AC induction motors. [Schneider Electric] Система управления электродвигателем The TeSys®… … Справочник технического переводчика
Контакторно-транзисторная система управления — Пускотормозные сопротивления КТСУ на трамвайном вагоне 71 619КТ. Контактор … Википедия
Реостатно-контакторная система управления — (сокр. РКСУ) комплекс электромеханического оборудования, предназначенного для регулирования тока в обмотках тяговых электродвигателей (ТЭД) подвижного состава метрополитена, трамвая, троллейбуса и железных дорог. Содержание 1 Принцип действия … Википедия
Непосредственная система управления — Центральным звеном НСУ является контроллер тяговых электродвигателей Непосредственная система управления (сокр. НСУ) комплекс электромеханического оборудования, предназначенного для регулирования тока в обмотках тяговых электродвигателей… … Википедия
Тиристорно-импульсная система управления — ТИСУ без драйверов по схеме Ларионова. Тиристорно импульсная система управления (сокр. ТИСУ) комплекс электронного и электромеханического управления для управления тяговыми двигателями (ТД) электров … Википедия
система — 4.48 система (system): Комбинация взаимодействующих элементов, организованных для достижения одной или нескольких поставленных целей. Примечание 1 Система может рассматриваться как продукт или предоставляемые им услуги. Примечание 2 На практике… … Словарь-справочник терминов нормативно-технической документации
Московская монорельсовая транспортная система — Информация … Википедия
ЭР2 — 1290 «Карелия … Википедия
Электропоезд ЭР2 — ЭР2 ЭР2 1290 «Карелия» на станции Невская Дубровка Основные данные … Википедия
Персональный автоматический транспорт — Возможно, эта статья содержит оригинальное исследование. Добавьте ссылки на источники, в противном случае она может быть выставлена на удаление. Дополнительные сведения могут быть на странице обсуждения. (11 мая 2011) … Википедия
Автоматизация производства — процесс в развитии машинного производства, при котором функции управления и контроля, ранее выполнявшиеся человеком, передаются приборам и автоматическим устройствам. А. п. основа развития современной промышленности, генеральное… … Большая советская энциклопедия
 18+© Академик, 2000-2024
18+© Академик, 2000-2024- Обратная связь: Техподдержка, Реклама на сайте
Экспорт словарей на сайты, сделанные на PHP, Joomla, Drupal, WordPress, MODx.
Перевод: с английского на все языки
со всех языков на английский- Со всех языков на:
- Английский
- С английского на:
- Русский